nPortNo
Port number of relevant drive.
iSlaveNo
Slave number of relevant drive.
lVelocity
Velocity to be changed in [pps]
FMM_OK : Command has been successfully performed.
FMM_NOT_OPEN : The drive has not been connected yet .
FMM_INVALID_PORT_NUM : There is no nPort in the connected ports .
FMM_INVALID_SLAVE_NUM : There is no drive of iSlaveNo in the relevant port .
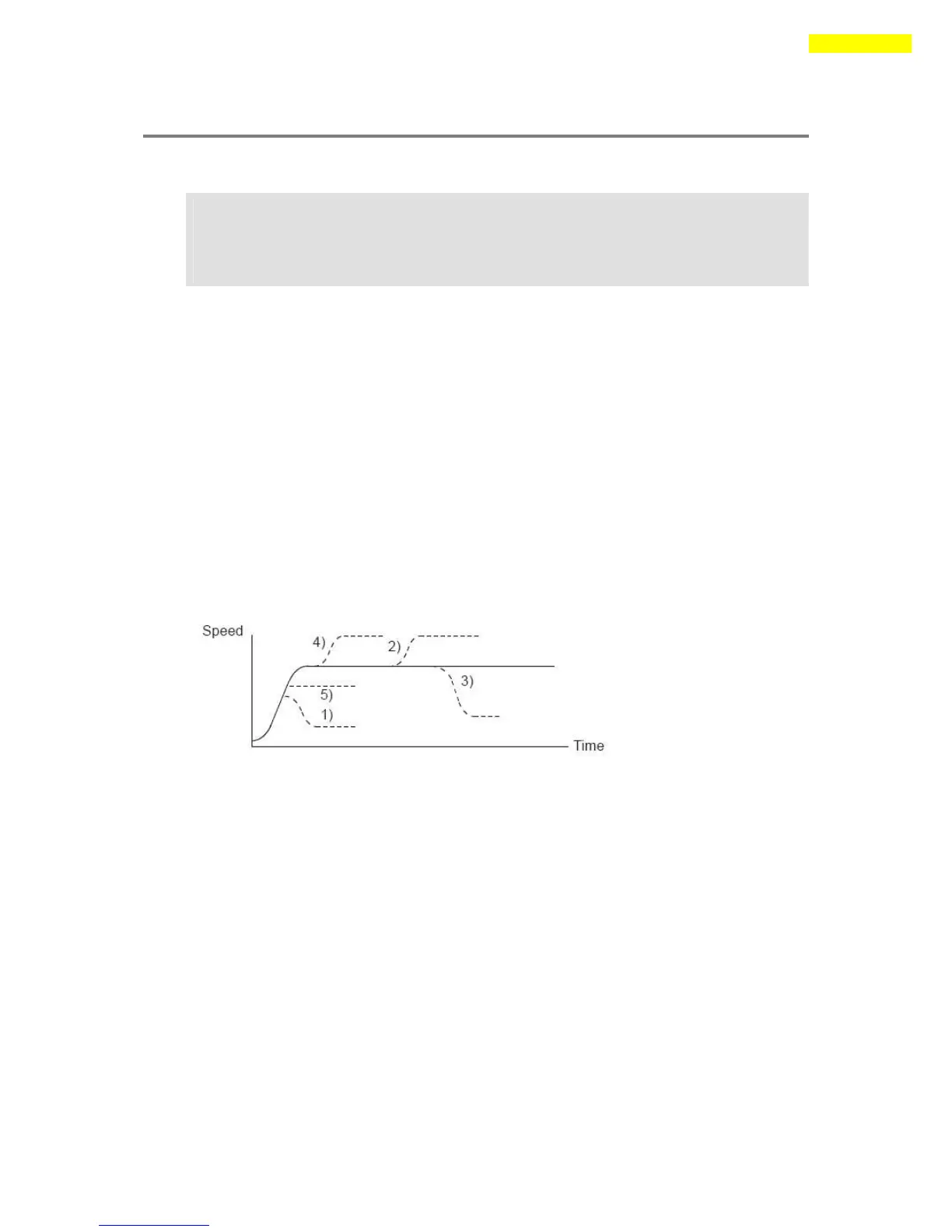
1) In case of ((change speed) < (speed before change)) , the motor reaches to the change
speed through acceleration/deceleration using a new velocity pattern .
5) In case of ((change speed) ≥ (speed before change)) , the motor reaches to the
change speed through acceleration/deceleration without any new velocity pattern .
4) The motor reaches to the ‘speed before change’without change of the velocity
pattern and then it reaches to the ‘change speed’by a new velocity pattern.
2),3) After acceleration/deceleration is finished, the motor reaches the change speed
corresponding to the velocity pattern of the ‘change speed’.