26
Twin fieldbus
systems
The following Twin fieldbus systems can be used to connect to the robot control for Twin
processes:
- Twin DeviceNet fieldbus robot interface
- Twin CANopen fieldbus robot interface
- Twin Interbus CU fieldbus robot interface
- Twin Profibus fieldbus robot interface
An integral PLC is also a feature of the "Twin fieldbus systems" as well as the "Twin inter-
faces". The signals are connected logically by this PLC. Both power sources are therefore
triggered simultaneously by a signal from the robot control. Only one "Twin fieldbus sys-
tem" is required for two power sources. The "Twin fieldbus system" is fitted to one of the
power sources. The connection to the second power source is established via LocalNet
and the connection to the robot control via the fieldbus.
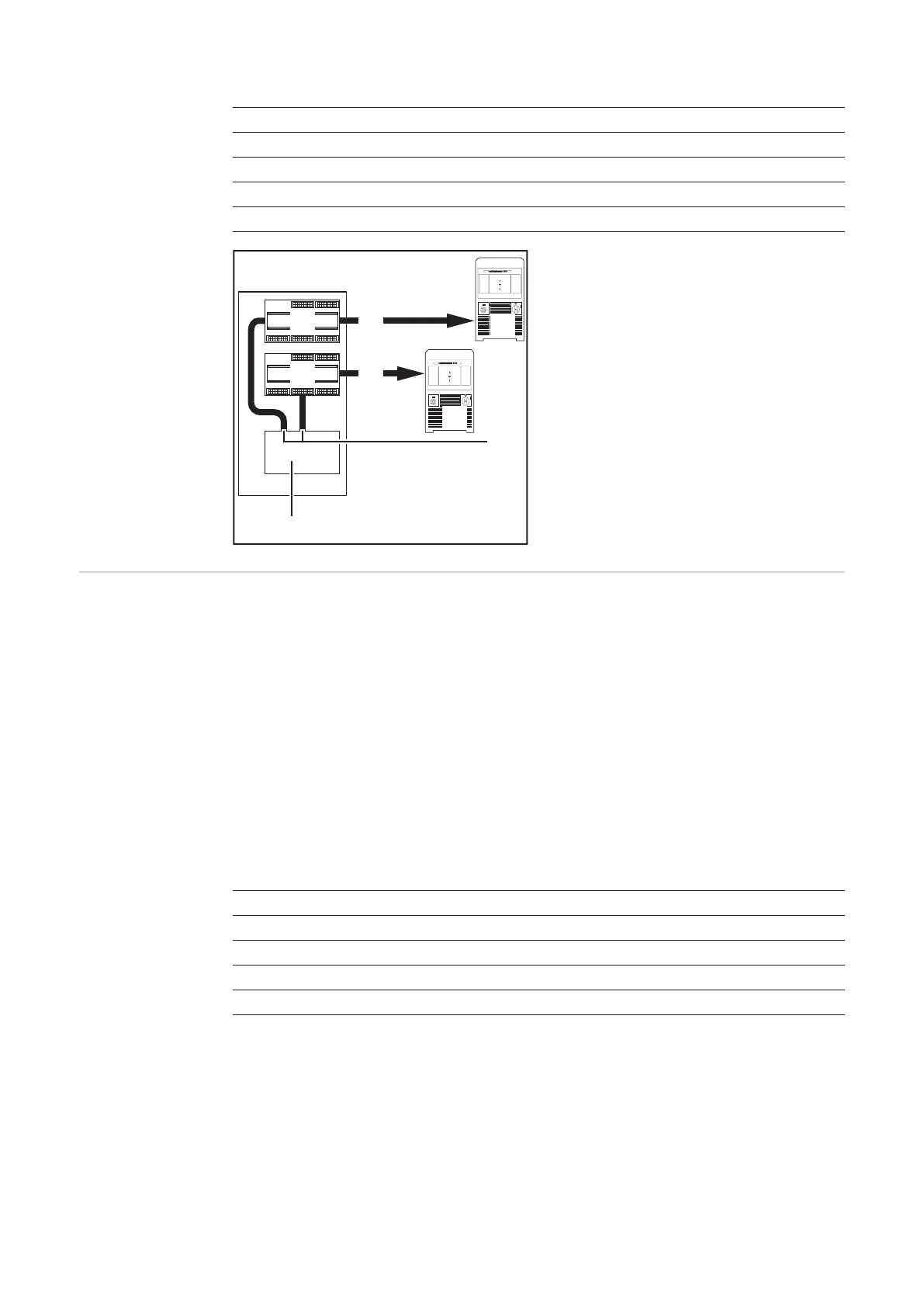
Application example:
No. Part/device No. Part/device
(1) Standard interface (5) Power source
(2) Standard interface (6) Power source
(3) LocalNet connection (7) Connection to robot control
(4) LocalNet connection (8) Robot control
(5)
(6)
(2) (4)
(1) (3)
(8)
(7)
Application example:
No. Part/device No. Part/device
(1) Robot control (5) Power source
(2) Fieldbus connection (6) LHSB-HUB
(3) Twin fieldbus system (7) Power source
(4) LocalNet connection