57
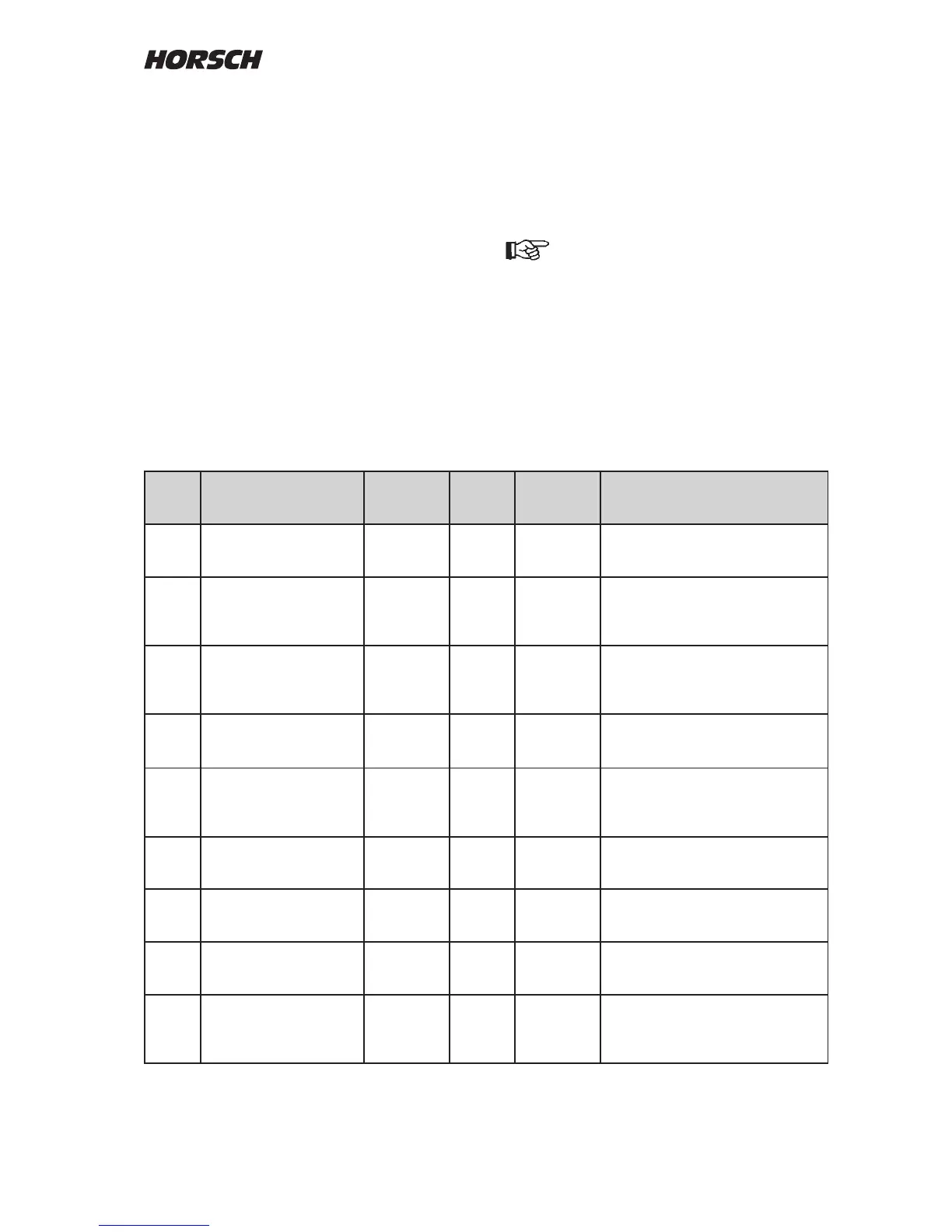
Alarm messages
Alarm
No.
Alarm text Alarm after
(sec.)
Con-
rmation
required
Alarm
repeat
(sec.)
Remedy
01 - 02
33 - 35
37
Motor (1 - 4) stopped immediately yes immediately Stop immediately and rectify cause
03 - 04
36
38
Motor (1 - 4) overheated immediately yes immediately Here the computer is monitored.
Stop immediately and rectify cause
of overheating - allow the computer
to cool down.
05 - 06 Machine computer (1 - 2)
failed
5 yes 60 Check cable connection between
monitor and computers.
Delete program in monitor and
reload.
07 - 08
39 - 40
Overload motor (1 - 4)
switched o
immediately immediately Once the current draw exceeds
approx. 16 A, stop and eliminate the
cause for this high current draw.
09 - 10
41 - 42
Current draw too high
motor (1 - 4)
60 10 Once the current consumption is
above 11 A for one minute, rectify
the cause for the hard moving
metering drive.
11 - 13 No signal position left
No signal position middle
No signal position right
10 10 If the signals for half width control
cannot be detected, check sensor or
switch position.
14 - 15
45 - 46
Motor (1 - 4) outside
control range
immediately 5 Keep changing the working speed,
until the motor is back in the control
range (15 - 150 rpm).
16 - 17
47 - 54
Setpoint for seed or
fertiliser cannot be
maintained
15 15 Once the set value is exceeded or
fallen short of by 10%, match the
working speed or change the rotor.
18 Seed ow system fault
sensor xx
immediately yes 15 In case of defective sensors or cable
breakage normally the last intact
sensor is displayed. The fault is
located after this sensor.
Alarm overview
All important system functions are monitored by
the computer and alarm messages are displayed
when limit values are exceeded or fallen short of.
There are default alarm messages like e.g.
"Hopper empty" and alarm messages, which
can be set by the operator like e.g. "min. and
max. fan speed".
Some alarm messages need to be conrmed,
others keep repeating, until the limit value is no
longer exceeded.
In case of malfunctions, which could damage
components (e.g. "Motor x overloaded") or if the
metering drive has failed ("Motor x stopped"),
the alarm is triggered without delay. It keeps
repeating, until the machine is stopped and the
cause of the fault is eliminated.
When lifting out the machine at the
headland all existing alarms atre
automatically acknowledged and
reactivated when the machine is
lowered again in the ground.