38
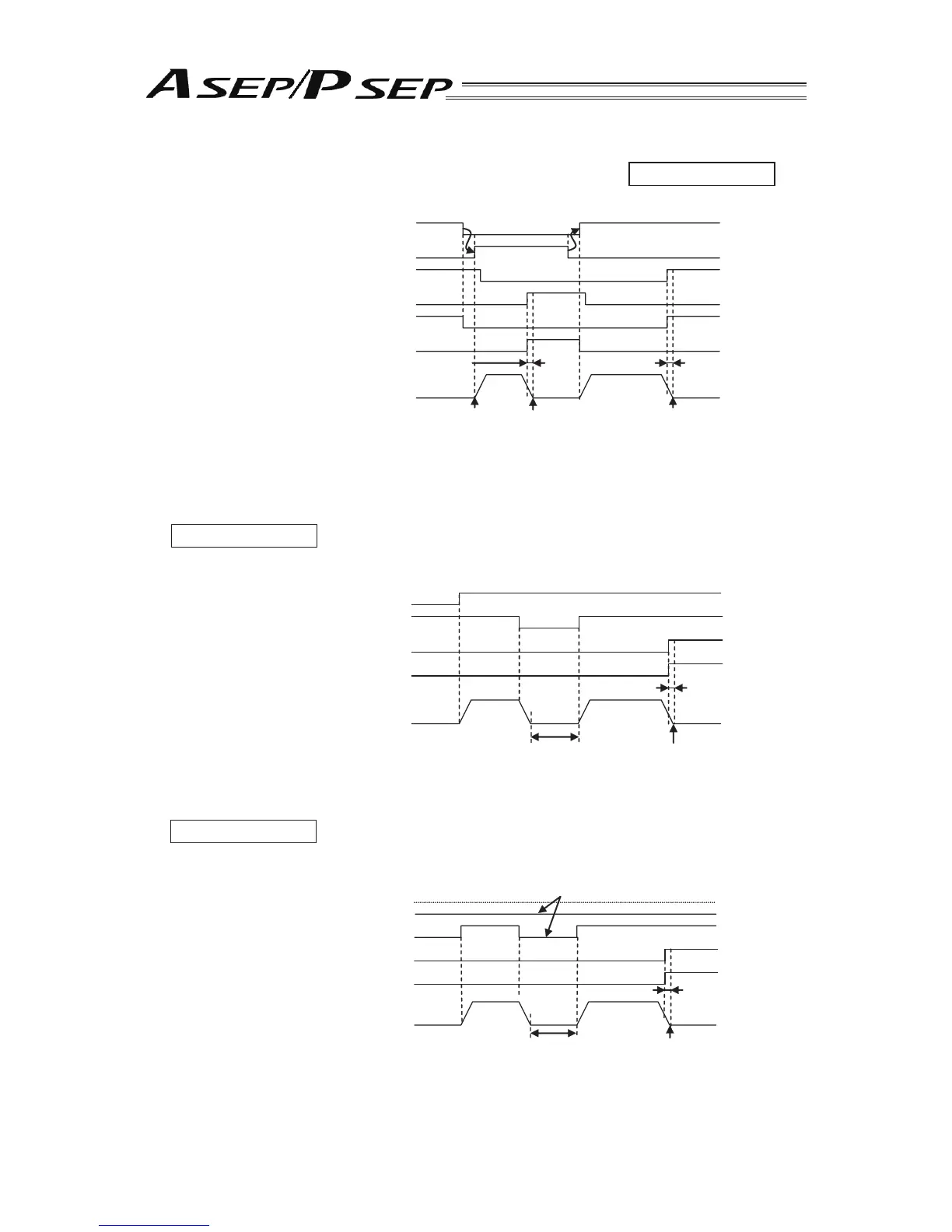
[3] Point-to-Point Movement (For Double Solenoid System) ••• PIO Pattern 0 to 2
With the combination of ST0 and ST1, the actuator is moved to the target position.
Positioning Width
(Parameter No.1)
Positioning Width
(Parameter No.1)
∗∗
Backward End
Forward End
Backward End
ctuator Operation
Backward End Movement Signal
(ST0)
Forward End Movement Signal
(ST1)
Backward End Position Detection Output
(LS0)
Forward End Position Detection Output
(LS1)
Backward Point Positioning Completion Output
(PE0)
Forward End Point Positioning Completion Output
(PE1)
* The movement command is to be issued, make sure to turn OFF both ST0 and ST1 and issue the
movement command to the target position.
[
4] Pause during the Movement Operation (For Single Solenoid System) •••
PIO Pattern 0 to 2
* Inputting the STP signal pauses the actuator motion. A forward end movement example is shows
as follows.
Pause
Positioning Width
(Parameter No.1)
Forward End
ctuator Operation
Movement Signal
(ST0)
Pause Signal
(*STP)
Forward End Position Detection Output
(LS1)
Forward End Point Positioning Completion Output
(PE1)
[5] Pause during the Movement Operation (For Double Solenoid System) •••
PIO Pattern 0 to 2
The actuator motion is paused by means of tuning OFF both of ST0 and ST1. The following fi gure
shows an example of forward end movement.
ST0 and ST1 turned OFF
Pause
Positioning Width
(Parameter No.1)
Forward End
ctuator Operation
Backward End Movement Signal
(ST0)
Forward End Movement Signal
(ST1)
Forward End Position Detection Output
(LS1)
Forward End Point Positioning Completion Output
(PE1)

 Loading...
Loading...









