39
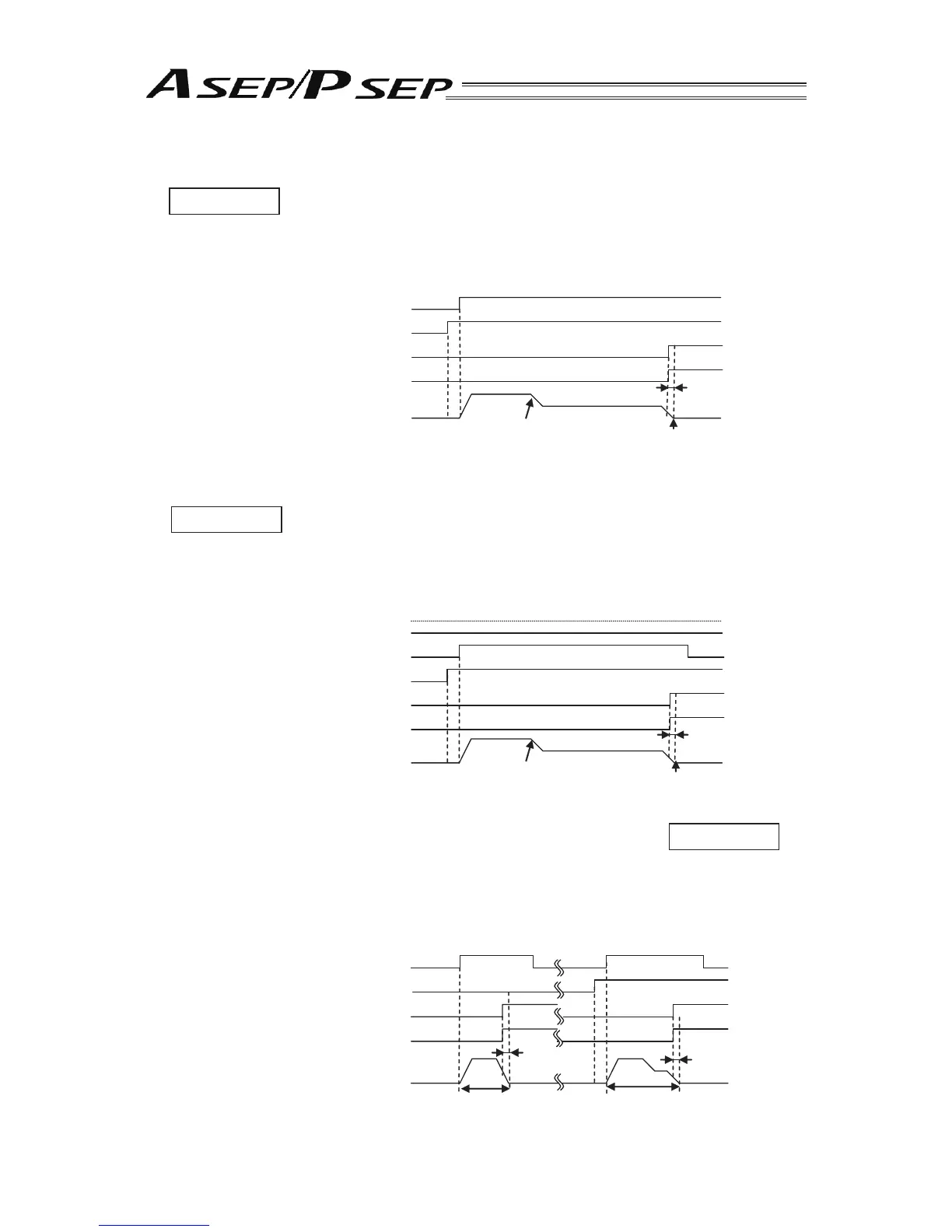
[6] Speed change during the movement (For Single Solenoid System) •••
PIO Pattern 1
The movement speed is changed during the actuator’s movement to the target position. When
the movement command is issued with SPDC turned ON, the actuator is moved at the changed
speed specifi ed using the Speed Change function from the position set for the speed change in
the position setting operation. The following fi gure shows an example of forward end movement.
Position set in the Position Change Operation
Positioning Width
(Parameter No.1)
Forward End
ctuator Operation
Movement Signal
(ST0)
Movement Speed Change Signal
(SPDC)
Forward End Position Detection Output
(LS1)
Forward End Point Positioning Completion Output
(PE1)
[7] Speed change during the movement (For Double Solenoid System) •••
PIO Pattern 1
The movement speed is changed during the actuator’s movement to the target position. When
the movement command is issued with SPDC turned ON, the actuator is moved at the changed
speed specifi ed using the Speed Change function from the position set for the speed change in
the position setting operation. The following fi gure shows an example of forward end movement.
Positioning Width
(Parameter No.1)
Position set in the Position Change Operation
Forward End
ctuator Operation
Backward End Movement Signal
(ST0)
Forward End Movement Signal
(ST1)
Movement Speed Change Signal
(SPDC)
Forward End Position Detection Output
(LS1)
Forward End Point Positioning Completion Output
(PE1)
[8] Target Position Setting Change (For Single Solenoid System) ••• PIO Pattern 2
When the operation is to be performed with the two types of works set differently each other, the
setting change is easy by means only of sending a single signal from PLC. When the movement
command is issued after CN1 is turned ON, the actuator is moved using the Position Setting 3, in
the case of moving to the forward end. In the case of moving to the backward end, the Position
Setting 2 is used. The following fi gure shows an example of forward end movement.
Position Setting 1 Position Setting 3
Positioning Width
Positioning Width
(Parameter No.1)
Positioning Width
(Parameter No.1)
ctuator Operation
Movement Signal
(ST0)
Target Position Change Signal
(CN1)
Forward End Position Detection Output
(LS1)
Forward End Point Positioning Completion Output
(PE1)

 Loading...
Loading...









