EtherCAT Communication
‑103‑
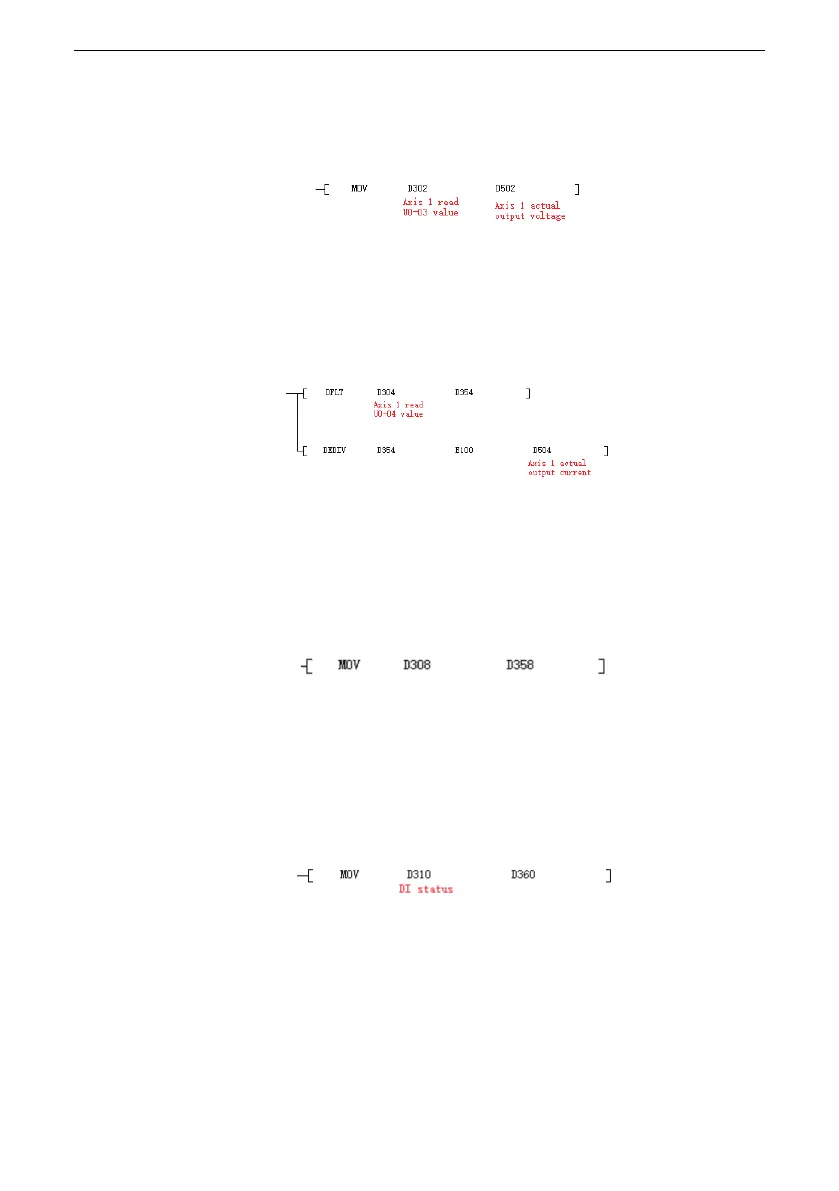
Based on the conversion rule, convert the output voltage U003 to 2070sub4 and
then the reading is the actual output voltage. Based on the communication
configuration, you can move or not move the D302 value to another D element.
5. Read output current
Based on the conversion rule, convert the output current U004 to 2070sub5 and
then divide the reading by 100 to obtain the actual output current. Based on the I/
O mapping, read D304.
The procedure is as follows:
6. Read AC drive state
Read U061 to get the current state of the AC drive and convert it to 2070sub3E
according to the conversion rule. Based on the I/O mapping, read D308.
1: Forward running; 2: Reverse running; 3: Stop
The procedure is as follows:
7. Read DI state
Based on the conversion rule, convert the DI state U007 to 2070sub8 and then
convert the reading to a binary number, in which the least significant bit indicates
DI1 status, the second least significant bit indicates DI2 status, and so on. Based on
the I/O mapping, read D310.
The procedure is as follows:
8. Read fault code
Based on the conversion rule, convert the fault code U045 to 2070sub2E and fault
sub‑code U046 to 2070sub2E. Based on the I/O mapping, read D312 and D314.
The procedure is as follows:

 Loading...
Loading...








