EtherCAT Communication
‑91‑
AC Drive Response Data
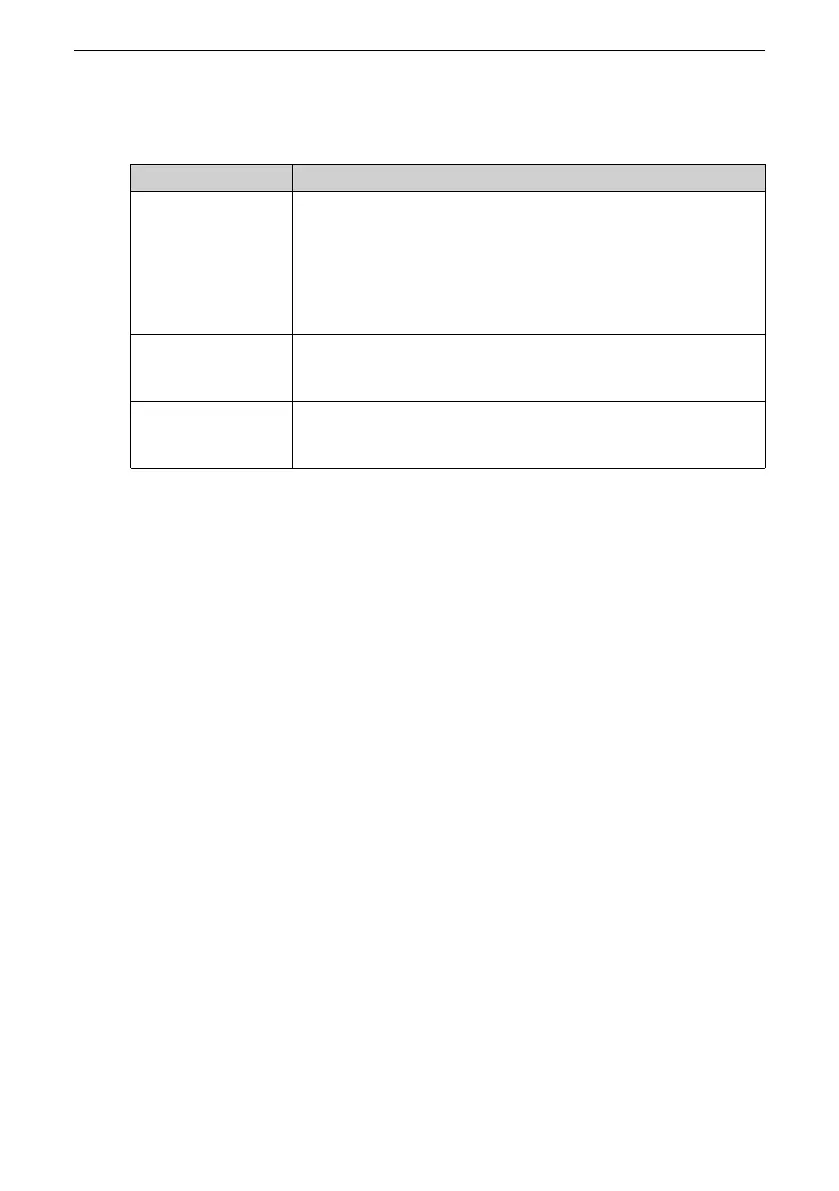
Table 5–4 TPDO of ac drive response data
RPDO
Description
TPDO1
AC drive running state
AC drive running state is determined by the bits as follows:
Bit0: 0: AC drive stop; 1: AC drive running
Bit1: 0: Forward running; 1: Reverse running
Bit2: 0: No fault; 1: AC drive fault
Bit3: 0: Operation frequency not reached; 1: Operation frequency
reached
TPDO2
AC drive operation frequency (unit: 0.01 Hz)
The current AC drive operation frequency is returned as 16‑bit
signed data.
TPDO3 to TPDO16
Reading function parameter values (groups F and A) and
monitoring parameter values (group U) in real time. For the
configuration method, see PDO data configuration.
5.6 SDO Data
EtherCAT Service data object (SDO) is used to transfer non‑cyclic data, such as
communication parameter configuration and servo drive running parameter
configuration.
The CoE service types of EtherCAT include: emergency message, SDO request, SDO
response, TxPDO, RxPDO, remote TxPDO transmit request, remote RxPDO transmit
request, and SDO information.
Currently, the AC drive supports SDO request and SDO response.
5.7 Parameters
Setting the ECAT Card of AC Drive
After installing the ECAT card to the AC drive, set Fd‑10 as follows to enable the ECAT
card to communicate with the AC drive. Fd‑50 and subsequent parameters are
optional.

 Loading...
Loading...








