EtherCAT Communication
‑92‑
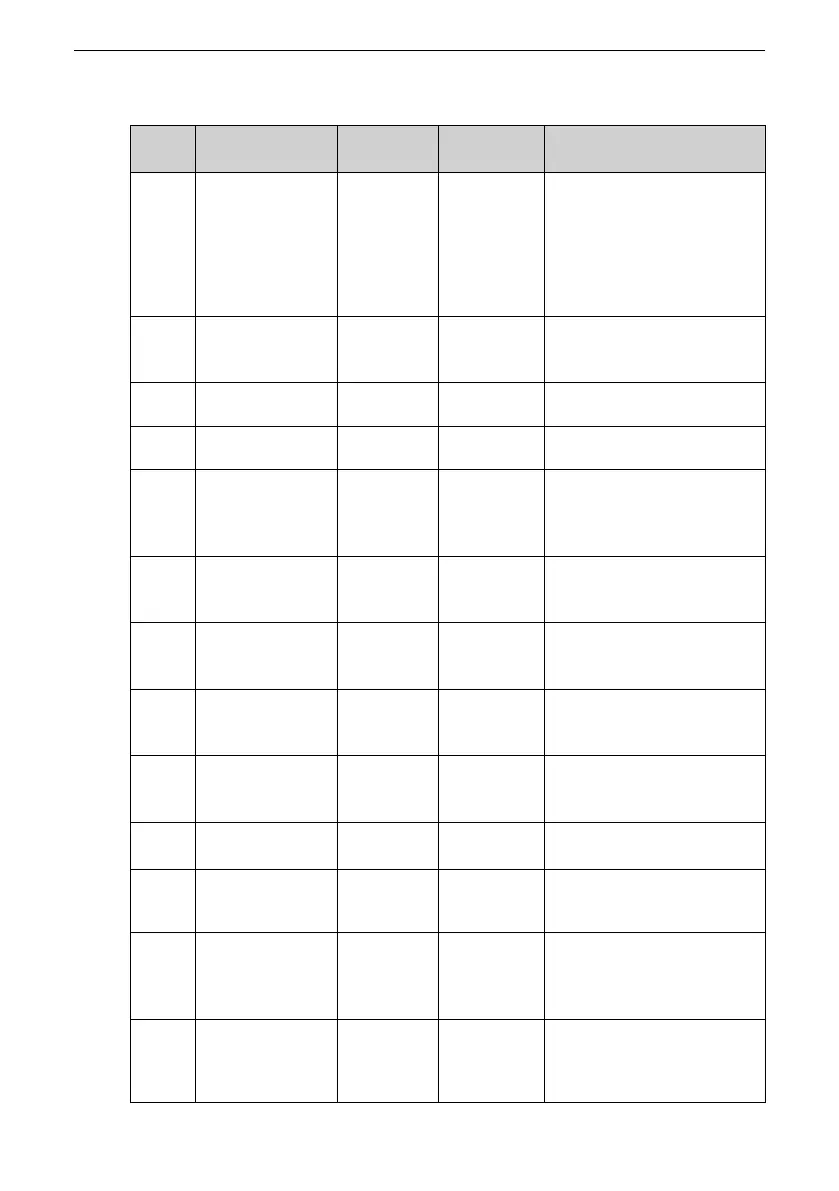
Table 5–5 Parameters of power supply unit
Para.
No.
Name
Value Range Setpoint Description
Fd‑10
Communication
protocol selection
1: CANopen
2: CANlink
3:
Communica
tion card
mode
3
If it is set to 1, CANopen
communication is selected. If
it is set to 2, CANlink
communication is selected. f
it is set to 3, the
communication card mode is
selected.
Fd‑50
Start with station
lost
0: Disabled
1: Enabled
0
The AC drive can still run
when this station is not
mapped.
Fd‑70
EtherCAT station
name
0 to 65535 0
EtherCAT station name
Fd‑71
EtherCAT station
alias
0 to 65535 0
EtherCAT station alias
Fd‑72
Number of
synchronization
interrupts allowed
by EtherCAT
0 to 30 10
Number of synchronization
interrupts allowed by
EtherCAT
Fd‑73
CRC check error of
EtherCAT‑Port0
0 to 65535 0
Maximum error value and
invalid frames of EtherCAT
port 0 per unit time
Fd‑74
CRC check error of
EtherCAT‑Port1
0 to 65535 0
Maximum error value and
invalid frames of EtherCAT
port 1 per unit time
Fd‑75
Data forwarding
error of EtherCAT
port 0/1
0 to 65535 0
Maximum forwarding error of
EtherCAT port per unit time
Fd‑76
EtherCAT
processing unit
and PDI error
0 to 65535 0
Maximum EtherCAT data
frame processing unit error
per unit time
Fd‑77
Link loss of
EtherCAT port 0/1
0 to 65535 0
Maximum link loss of
EtherCAT port 0 per unit time
Fd‑78
EtherCAT host
type selection
0 to 65535 0
Determined by the host
controller type. Reserved for
non‑standard models.
Fd‑79
EtherCAT
synchronization
error monitoring
mode setting
0 to 1 0
Sets the fault
(synchronization frame loss)
detection mode.
Fd‑80
Number of
EtherCAT
synchronization
frame loss
0 to 65535 0
Number of synchronization
loss

 Loading...
Loading...








