- 154 -
6 Trial Running
6
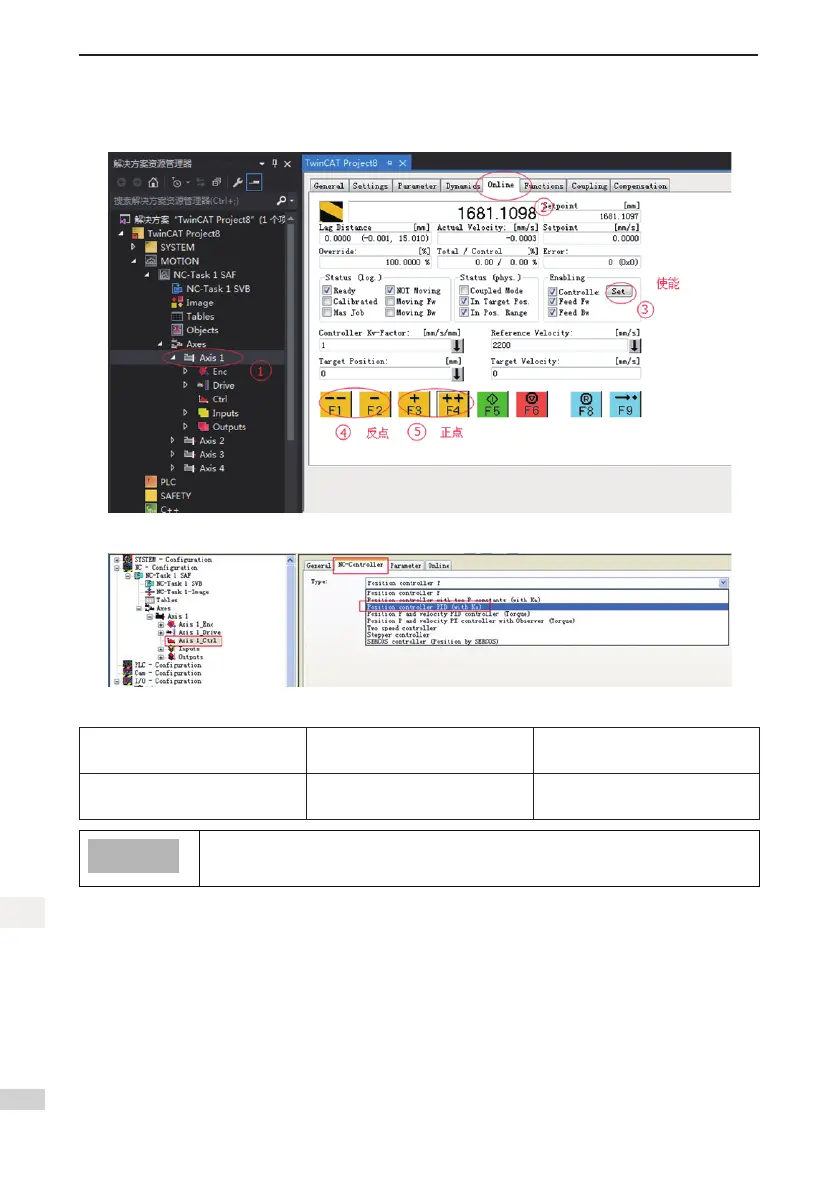
9. Perform the test run of the NC axis.
a)Click"Set"toopenthepop-updialogbox,thenclick"All,"theservodriveisnowenabled.ClickF1to
F4 to carry out the jog running.
b) You can set the control type.
c)PIDtypeofcontrolloop:
Positionloop:Drive
Speedloop:Drive
Drive:Positionmode Position Controller P
Positionloop:TWinCATNC
Speedloop:Drive
Drive:Velocitymode Position Controller PID (With Ka)
The TWinCAT NC controller can also implement the speed loop, and sends the target torque
tothedriveineachcycle.Thismethodhowever,actuallyincreasestheCPUandnetworkload,
and is not recommended.

 Loading...
Loading...





