- 167 -
6 Trial Running
6
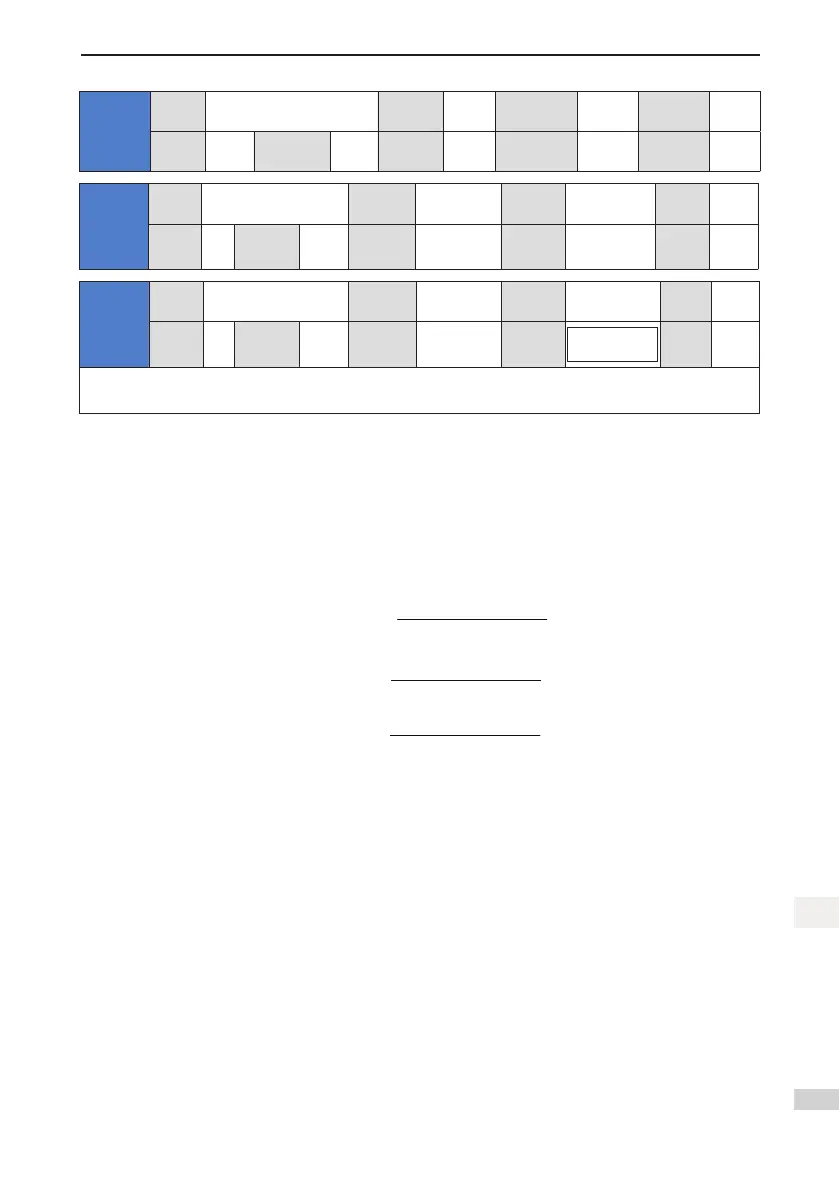
Sub-index
0h
Name
Number of sub-indexes of
the gear ratio
Setting &
Effective
-
Data
Structure
-
Data
Format
Uint8
Access RO Mapping NO
Relevant
Mode
- Data Range - Default 2
Sub-index
1h
Name Motor resolution
Setting &
Effective
Run settings
Immediate
Data
Structure
-
Data
Format
Uint32
Access RW Mapping RPDO
Relevant
Mode
-
Data
Range
0–
0xFFFFFFFF
Default 8
Sub-index
2h
Name Axis resolution
Setting &
Effective
Run settings
Immediate
Data
Structure
-
Data
Format
Uint32
Access RW Mapping RPDO
Relevant
Mode
-
Data
Range
0–
0xFFFFFFFF
Default 1
Thegearratioiswithintherange:(0.001xencoderresolution/10,000,4,000xencoderresolution/10,000)
If this range is exceeded, Er.B03 (gear ratio setting exceeding limit) will be detected.
Taketheloadballscrewasanexample.
Minimum reference unit fc = 1 mm
Lead pB = 10 mm/r
Reductionration=5:1
Inovance 20-bit serial encoder motor resolution P = 1048576(p/r)
Thepositionfactoriscalculatedasfollows:
Positionfactor:
Motor resolution P*n
PB
Position
factor
=
=
1048576 × 5
10
=
5242880
10
=
524288
Therefore, 6091-1h = 524288, 6091-2h = 1,
which means that when the drive shaft displacement is 1 mm, the motor displacement is 524288.
Theratioof6091-1hand6091-2hmustbereducedtowithout common divisor,andissubjecttothenal
value!

 Loading...
Loading...





