These function codes define the V/F curve of
Goodrive200A motor 1, and meet the need of
different loads.
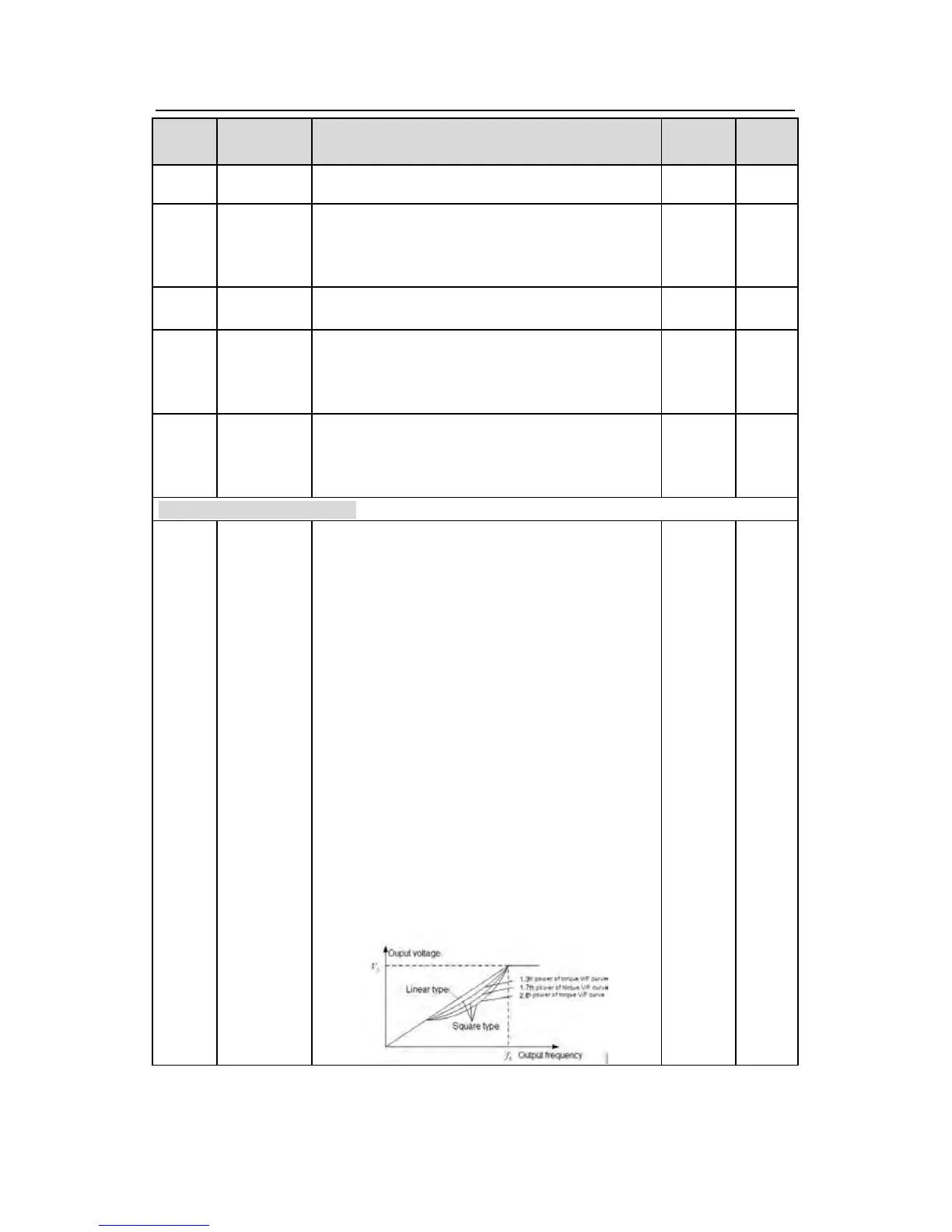
0:Straight line V/F curve;applying to the constant
torque load
1:Multi-dots V/F curve
2:1.3
th
power low torque V/F curve
3:1.7
th
power low torque V/F curve
4:2.0
th
power low torque V/F curve
Curves 2~4 apply to the torque loads such as
fans and water pumps. Users can adjust
according to the features of the loads to achieve
a best energy-saving effect.
5:Customized V/F(V/F separation); in this mode,
V can be separated from f and f can be adjusted
through the frequency reference channel set by
P00.06 or the voltage reference channel set by
P04.27 to change the feature of the curve.
Note: V
b
in the below picture is the motor rated
voltage and f
b
is the motor rated frequency.