SV-DA200 series AC servo drives Faults and solutions
‐129‐
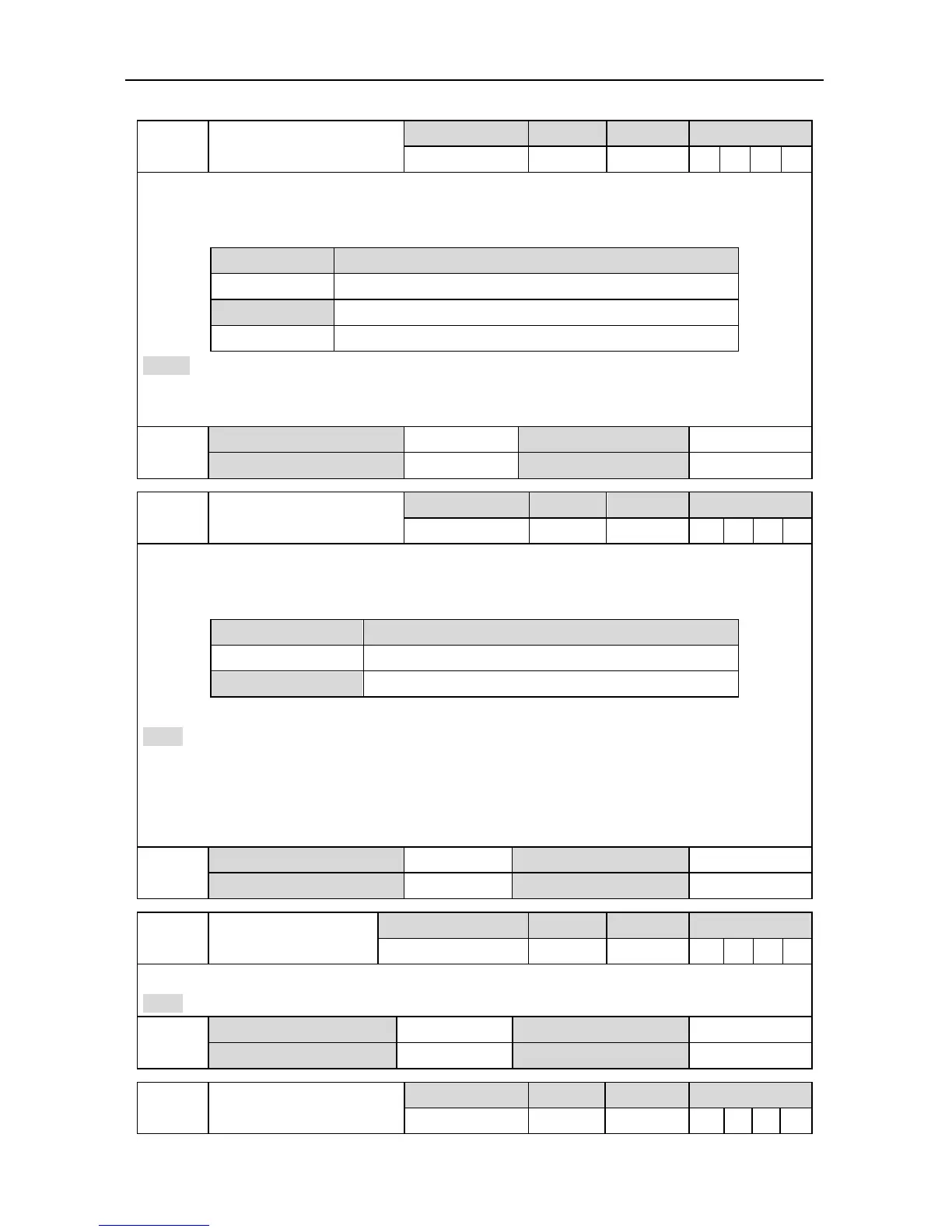
6.4.3 Digital input / output settings
P3.40
1
Travel limit switch shield
Setting range Default Unit Available mode
0~2 1 - P S T F
This parameter is used to set whether the digital input configured as forward drive disabling
(0x001 or 0x101) and reverse drive disabling (0x002 or 0x102) is valid or not. If the function of the
travel limit switch needs to be shielded , this parameter can do the trick.
Setting value Function
0 Travel limit switch is normal
[1] Travel limit switch is disabled
2 Ultralimit fault
Note: When the travel limit switch is normal and the digital input configured as forward drive
disabling is active, the motor will stop immediately and cannot continue to run forward, but it is
able to receive the reverse running command.
P3.40
1
Data size 16bit Data format DEC
Modbus address 1680,1681 CANopen address 0x2328,0x00
P3.41
1
Emergency stop switch
shield
Setting range Default Unit Available mode
0~1 1 - P S T F
This parameter is used to set whether digital input configured as EMG (0x016 or 0x116) is valid or
not. If the function of the emergency stop switch needs to be shielded, this parameter can do the
trick.
Setting value Function
0 Emergency stop switch is normal
[1] Emergency stop switch is disabled
If the digital input set as EMG is active, then Er10-4 will occur.
Note:
1. If Er10-4 occurs, the servo drive will stop at the stopping mode set by P4.30.
2. Clearance of Er10-4: Please ensure there is no danger, and then clear the alarm signal
(disable the digital input configured as EMG). After clearing the alarm displayed, it is necessary to
enable the servo drive again to operate the servo system.
P3.41
1
Data size 16bit Data format DEC
Modbus address 1682,1683 CANopen address 0x2329,0x00
P3.43
1
Digital input filter
Setting range Default Unit Available mode
1~800 1 0.125ms P S T F
This parameter is used to set the filter time of the digital input.
Note: The parameter works alone for 10 digital inputs.
P3.43
1
Data size 16bit Data format DEC
Modbus address 1686,1687 CANopen address 0x232B,0x00
P3.44
Command pulse input
invalid setting disabled
Setting range Default Unit Available mode
0~1 0 - P F
 Loading...
Loading...
