SV-DA200 series AC servo drives Faults and solutions
‐193‐
6.9 State monitoring
6.9.1 User monitoring parameters (R0 group)
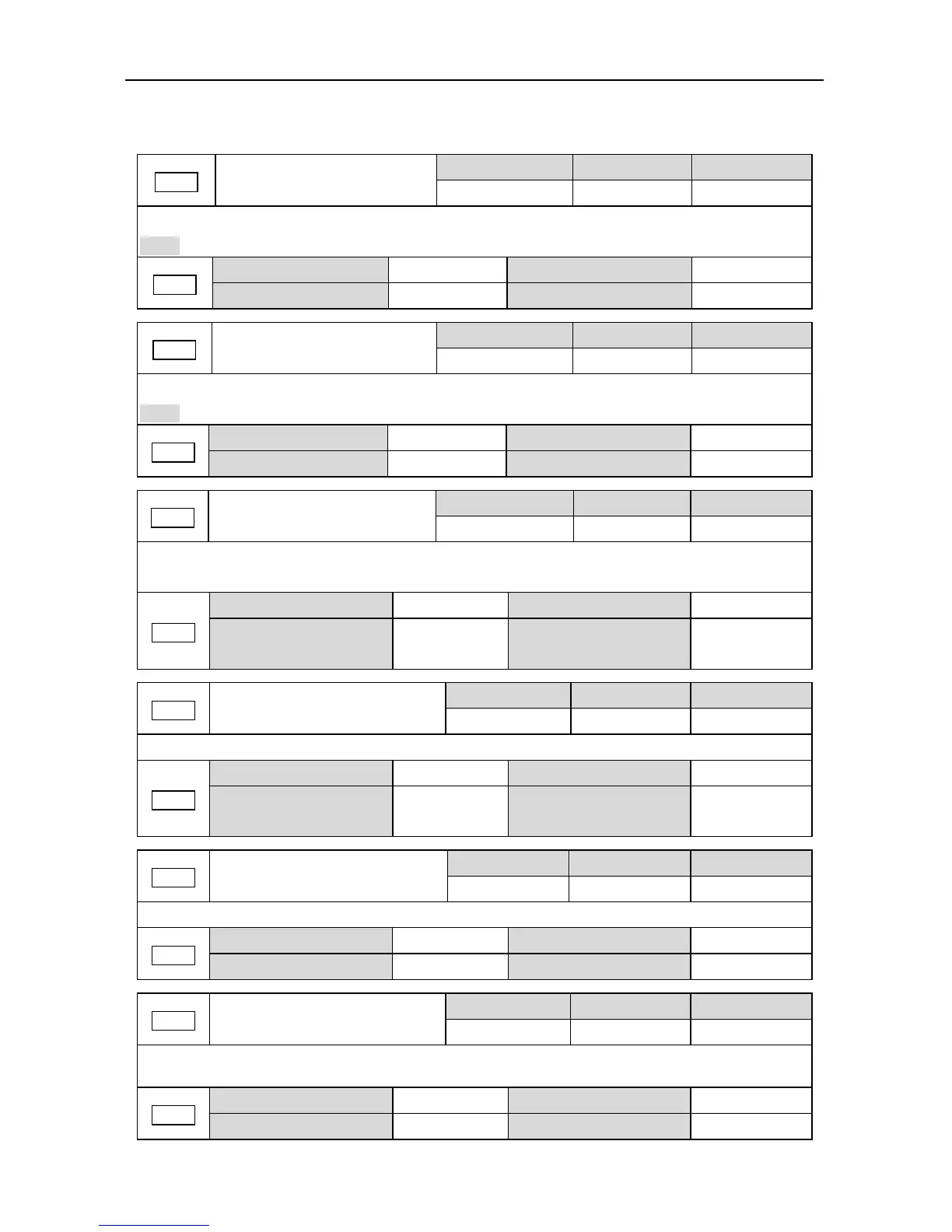
R0.00 Motor speed
Display range Precision Unit
-9999.9~9999.9 0.1 r/min
Display the actual speed of the servo motor
Note: This parameter is processed with filtering when displaying.
R0.00
Data size 32bit Data format DEC
Modbus address 4000,4001 CANopen address 0x3000,0x00
R0.01 Speed command
Display range Precision Unit
-9999.9~9999.9 0.1 r/min
Display the current speed command of the servo motor.
Note: If the ACC/DEC time is enabled, the speed command is processed by the ACC/DEC time.
R0.01
Data size 32bit Data format DEC
Modbus address 4002,4003 CANopen address 0x3001,0x00
R0.02 Feedback pulse accumulation
Display range Precision Unit
-(2
63
-1)~(2
63
-1) 1 reference unit
Accumulate and display the feedback accumulation pulse of the servo motor encoder. With sign
and the unit is the user unit.
R0.02
Data size 64bit Data format DEC
Modbus address
4004,4005,
4006,4007
CANopen address
0x3002,0x00
0x3002,0x01
R0.03 Command pulse accumulation
Display range Precision Unit
-(2
63
-1)~(2
63
-1) 1 reference unit
Accumulate and display the command pulse accumulation. With sign and the unit is the user unit.
R0.03
Data size 64bit Data format DEC
Modbus address
4008,4009,
4010,4011
CANopen address
0x3003,0x00
0x3003,0x01
R0.04 Retention pulse
Display range Precision Unit
-(2
31
-1)~(2
31
-1) 1 reference unit
Display the number of retention pulses of the position deviation counter. The unit is the user unit.
R0.04
Data size 32bit Data format DEC
Modbus address 4012,4013 CANopen address 0x3004,0x00
R0.05 Hybrid control deviation
Display range Precision Unit
-(2
31
-1)~(2
31
-1) 1 reference unit
This parameter is used to display the tolerance between the encoder feedback position and the
grating feedback position in fully-closed up mode. With sign, and the unit is the user unit.
R0.05
Data size 32bit Data format DEC
Modbus address 4014,4015 CANopen address 0x3005,0x00

 Loading...
Loading...