SV-DA200 series AC servo drives Faults and solutions
‐165‐
P6.39
Data size 16bit Data format DEC
Modbus address 2278, 2279 CANopen address 0x2627, 0x00
P6.40
Gantry synchronization
alignment approaching speed
Setting range Default Unit Available mode
1~60 5 r/min P
This parameter is used to set the gantry synchronization alignment approaching speed: the
speed of servo in approaching alignment sensor again after contacting two alignment sensors.
P6.40
Data size 16bit Data format DEC
Modbus address 2280, 2281 CANopen address 0x2628, 0x00
P6.41 Gantry alignment direction
Setting range Default Unit Available mode
0~1 0 - P
Gantry alignment direction can be set via this parameter:
Setting value Instruction
[0] Forward
1 Reverse
P6.41
Data size 16bit Data format DEC
Modbus address 2282, 2283 CANopen address 0x2629, 0x00
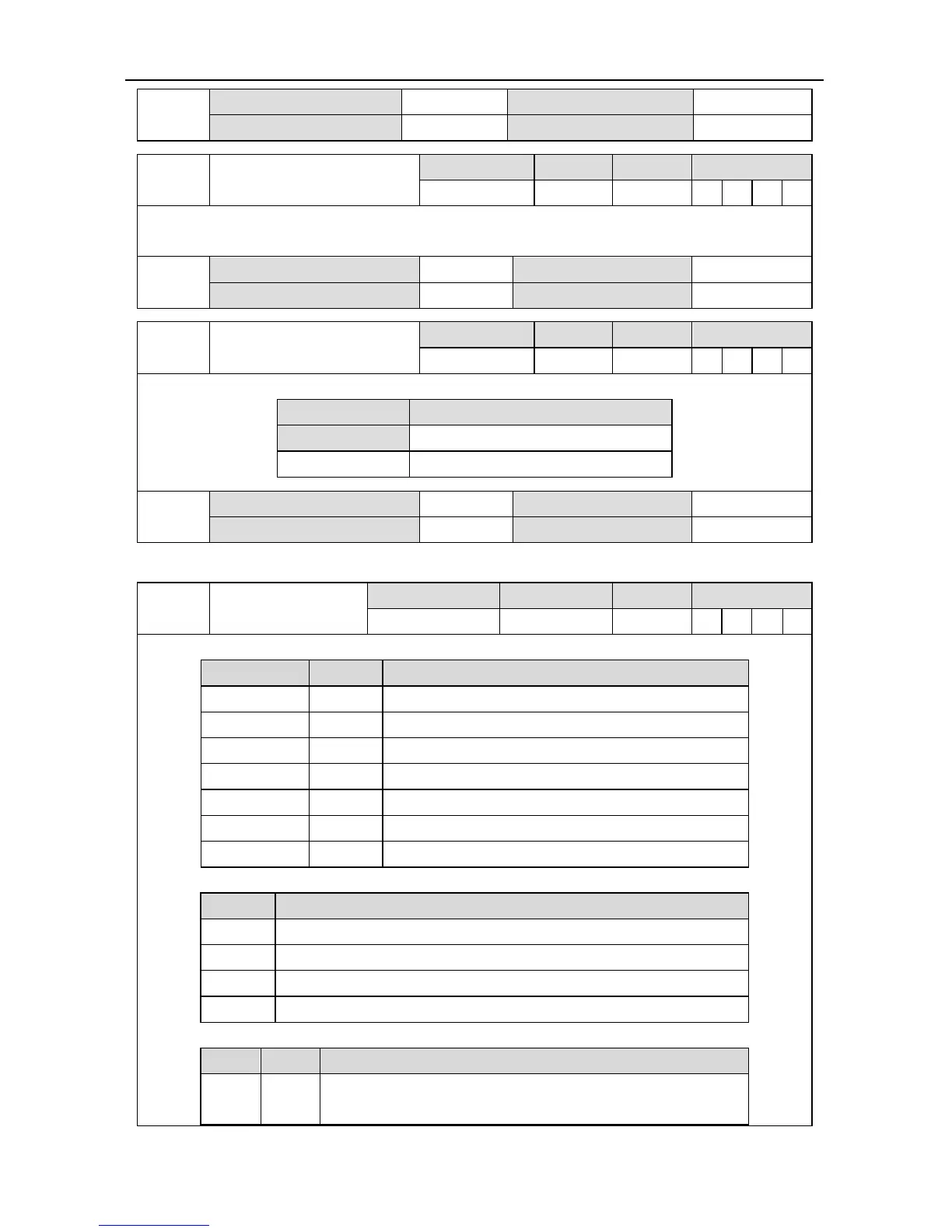
6.8 PTP (point-to-point) control (PtP0, PtP1, PtP2)
PtP0.00 00
th
control word
Setting range Default Unit Available mode
0~0x7FFFFFFF 0x00000000 - P
Description:
Bit Name Function
Bit0~3 MODE PTP operation mode
Bit4~7 OPT PTP attribute
Bit8~11 ACC ACC/DEC time index
Bit12~15 SPD Target speed index
Bit16~19 DLY Delay time index
Bit20~23 CYL Cycle number of current PTP execution
Bit24~30 JMP Jump to the next PTP
MODE:
MODE Instruction
0 Stop after the execution of current PTP
1 Jump to the next PTP after the execution of current PTP
2 Stop after the cycle, the cycle is invalid if CMD=1
3 Jump to the next PTP after the cycle, the cycle is invalid if CMD=1
OPT:
Bit Name Function
Bit4 INS
Insert off, to stop the executing PTP or the PTP to be
executed

 Loading...
Loading...