SV-DA200 series AC servo drives Faults and solutions
‐164‐
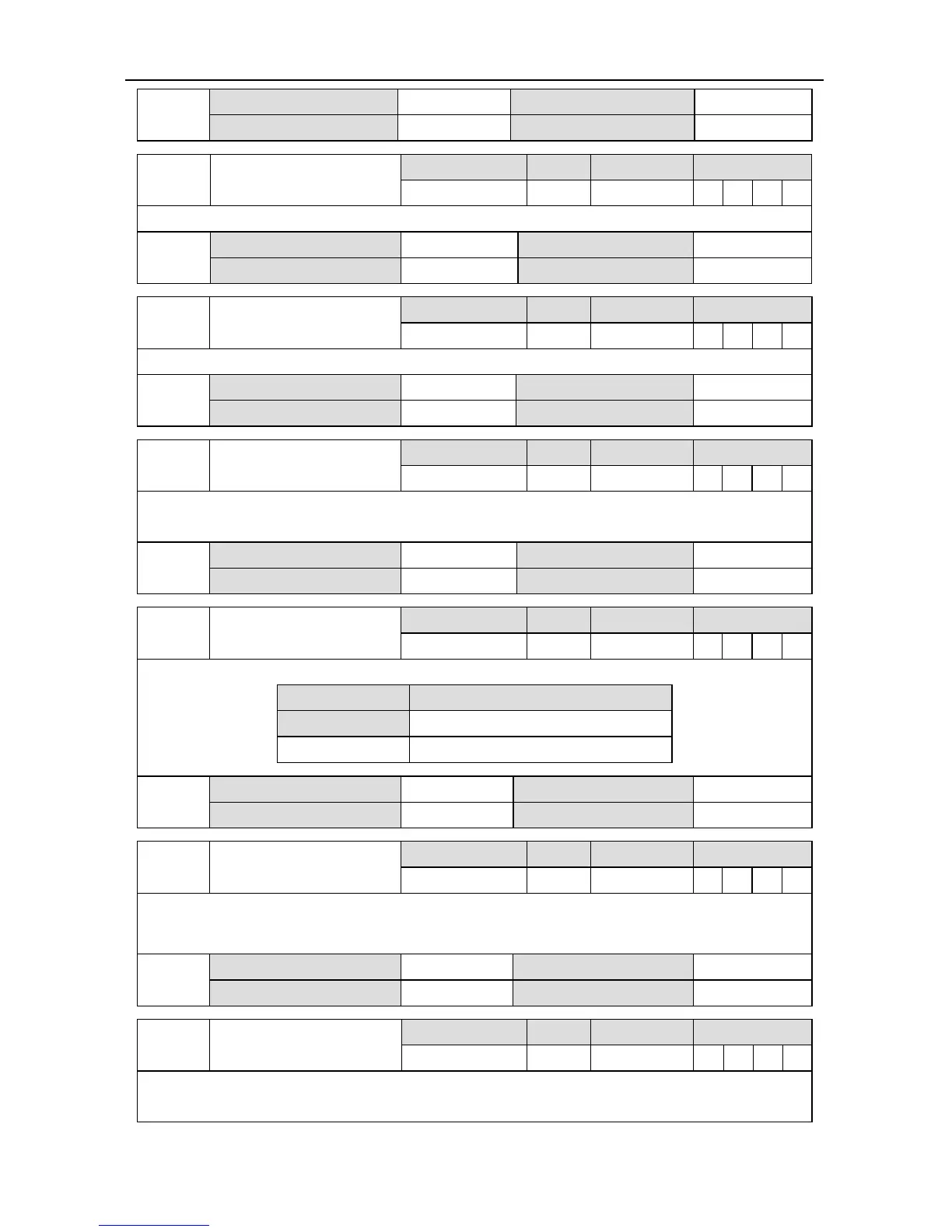
P6.33
Data size 16bit Data format DEC
Modbus address 2266, 2267 CANopen address 0x2621, 0x00
P6.34
Gantry synchronous
compensation torque filter
Setting range Default Unit Available mode
0.00~64.00 0.00 ms P
This parameter is used to set the time constant of gantry synchronous compensation torque filter.
P6.34
Data size 16bit Data format DEC
Modbus address 2268, 2269 CANopen address 0x2622, 0x00
P6.35
Gantry synchronous
compensation speed filter
Setting range Default Unit Available mode
0.00~64.00 0.00 ms P
This parameter is used to set the time constant of gantry synchronous compensation speed filter.
P6.35
Data size 16bit Data format DEC
Modbus address 2270, 2271 CANopen address 0x2623, 0x00
P6.36
Gantry synchronous
control bandwidth ratio
Setting range Default Unit Available mode
0.0~1000.0 0.0 % P
This parameter is used to set the gantry synchronous control bandwidth ratio: bandwidth
ratio=servo bandwidth/(servo bandwidth+synchronous bandwidth).
P6.36
Data size 16bit Data format DEC
Modbus address 2272, 2273 CANopen address 0x2624, 0x00
P6.37
1
Gantry synchronization
master/slave selection
Setting range Default Unit Available mode
0~1 0 - P
This parameter is used to set the gantry synchronization master/slave:
Setting value Instruction
[0] Slave
1 Master
P6.37
1
Data size 16bit Data format DEC
Modbus address 2274, 2275 CANopen address 0x2625, 0x00
P6.38
Gantry synchronization
alignment retreat distance
Setting range Default Unit Available mode
-(2
31
-2)~(2
31
-2) 10000 reference unit P
This function is used to set the gantry synchronization alignment retreat distance: the retreat
distance of the servo after contacting two alignment sensors.
P6.38
Data size 32bit Data format DEC
Modbus address 2276, 2277 CANopen address 0x2626, 0x00
P6.39
Gantry synchronization
alignment retreat speed
Setting range Default Unit Available mode
1~200 60 r/min P
This function is used to set the gantry synchronization alignment retreat speed: the retreat speed
of the servo after contacting two alignment sensors.

 Loading...
Loading...