SV-DA200 series AC servo drives Faults and solutions
‐163‐
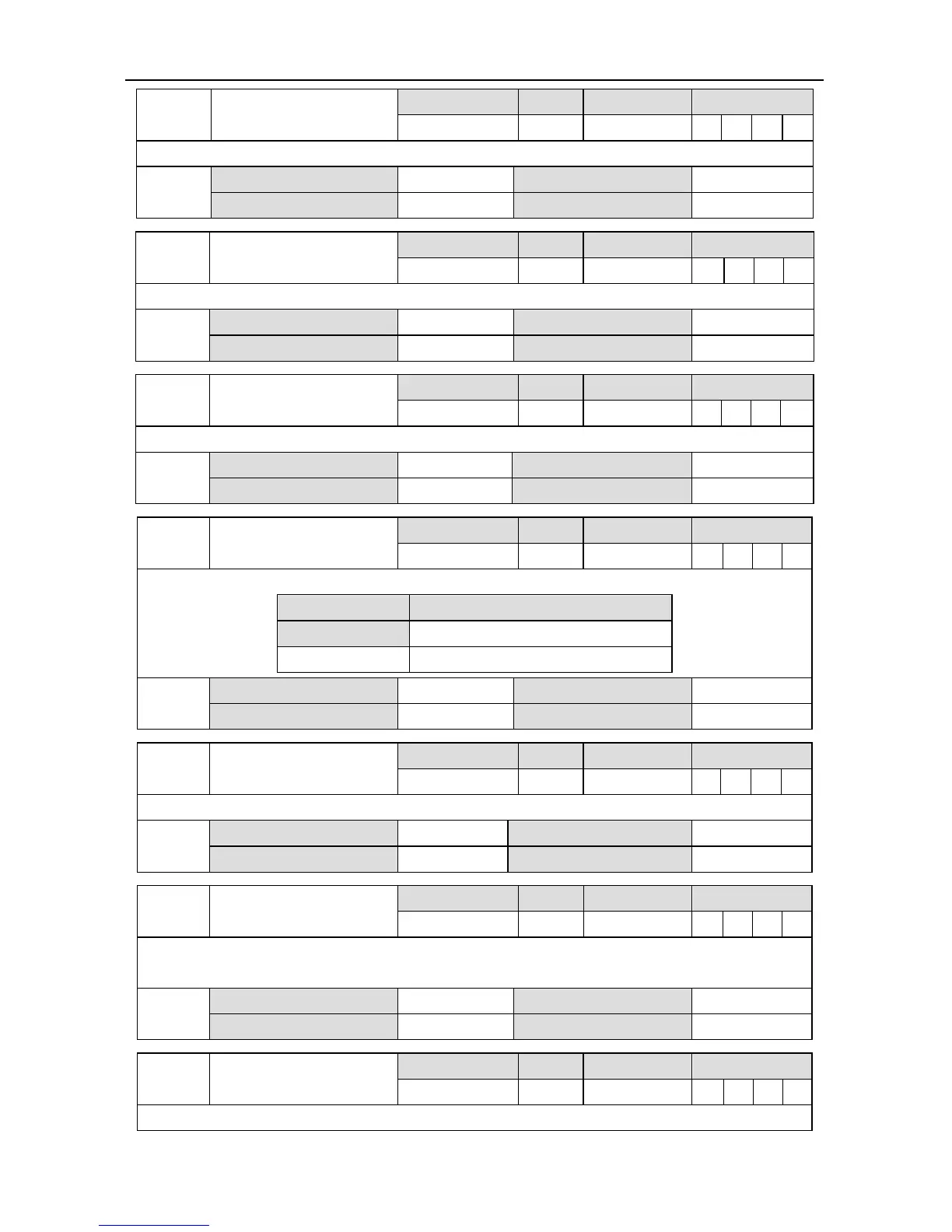
P6.21 Turret number
Setting range Default Unit Available mode
1~128 16 piece P
This parameter is used to set turret number.
P6.21
Data size 16bit Data format DEC
Modbus address 2242, 2243 CANopen address 0x2615, 0x00
P6.22
Turret pulse number per
cycle
Setting range Default Unit Available mode
2~(2
31
-1) 10000 reference unit P
This parameter is used to set turret pulse number per cycle.
P6.22
Data size 32bit Data format DEC
Modbus address 2244, 2245 CANopen address 0x2616, 0x00
P6.23
1
Starting point of turret
Setting range Default Unit Available mode
-(2
31
-1)~(2
31
-1) 0 reference unit P
This parameter is used to set starting point of turret.
P6.23
1
Data size 32bit Data format DEC
Modbus address 2246, 2247 CANopen address 0x2617, 0x00
P6.30
1
Gantry synchronization
function switch
Setting range Default Unit Available mode
0~1 0 - P
This parameter is used to set the gantry synchronization switch.
Setting value Function
[0] Disabled
1 Enabled
P6.30
1
Data size 16bit Data format DEC
Modbus address 2260, 2261 CANopen address 0x261E, 0x00
P6.31
Gantry synchronous
speed control gain
Setting range Default Unit Available mode
0.0~3276.7 0.0 Hz P
This parameter is used to set the gantry synchronous speed control gain.
P6.31
Data size 16bit Data format DEC
Modbus address 2262, 2263 CANopen address 0x261F, 0x00
P6.32
Gantry synchronous
speed control integral
Setting range Default Unit Available mode
0.1~1000.0 1000.0 ms P
This parameter is used to set the time constant of gantry synchronous speed control integral.
Please note that when this parameter is set to 1000, it means integral action is invalid.
P6.32
Data size 16bit Data format DEC
Modbus address 2264, 2265 CANopen address 0x2620, 0x00
P6.33
Gantry synchronous
position control gain
Setting range Default Unit Available mode
0.0~3276.7 1000.0 Hz P
This parameter is used to set the gantry synchronous position control gain.
 Loading...
Loading...
