SV-DA200 series AC servo drives Faults and solutions
‐162‐
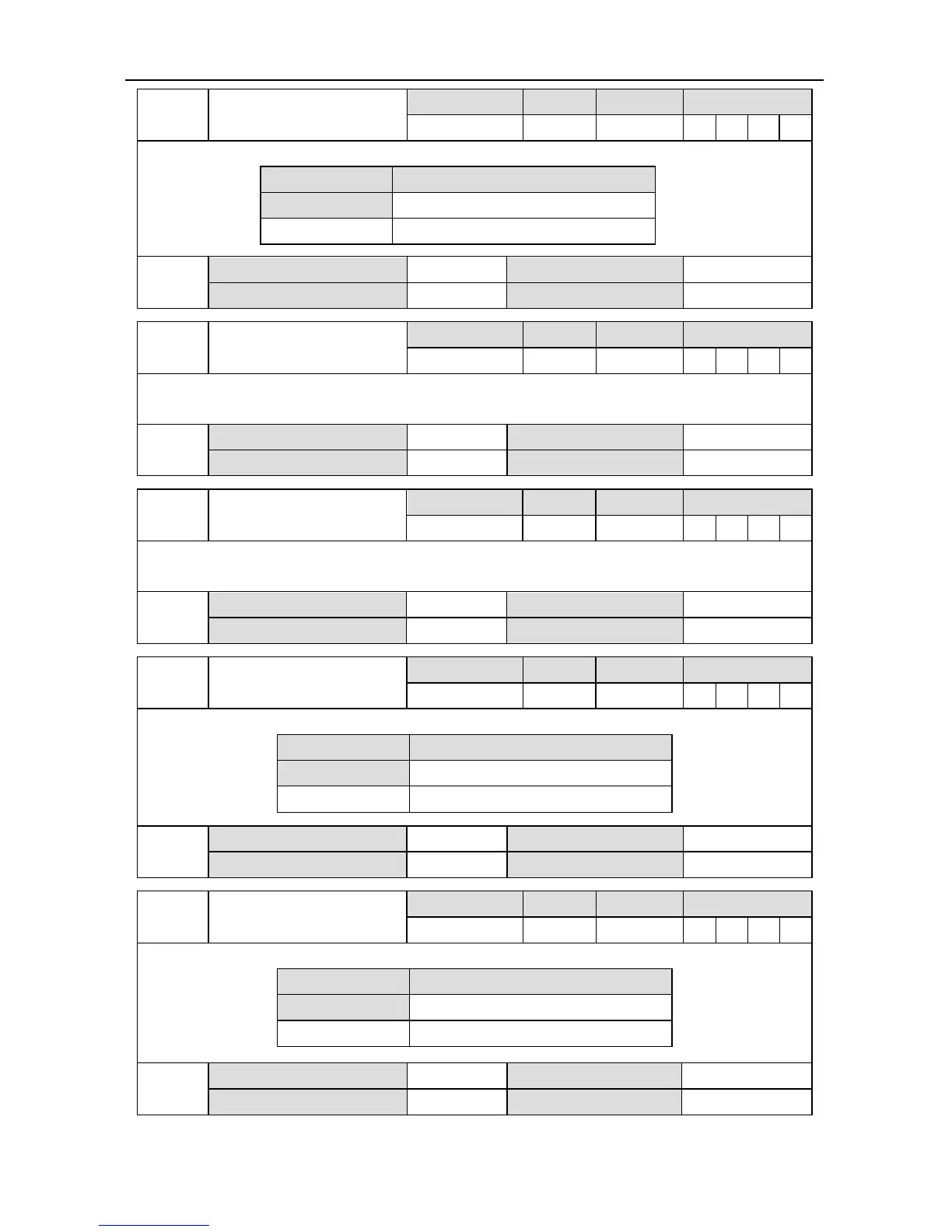
P6.03 Position latch save mode
Setting range Default Unit Available mode
0~1 0 - P
Position latch save mode can be set via this parameter:
Setting value Function
[0] Do not save
1 Save
P6.03
Data size 16bit Data format DEC
Modbus address 2206, 2207 CANopen address 0x2603, 0x00
P6.04 Forward high JOG speed
Setting range Default Unit Available mode
0~6000 60 r/min P
This parameter is used to set the speed of fast forward jogging which is triggered by forward
jogging terminal and switching terminal of high-low jogging speed.
P6.04
Data size 16bit Data format DEC
Modbus address 2208, 2209 CANopen address 0x2604, 0x00
P6.05 Reverse high JOG speed
Setting range Default Unit Available mode
-6000~0 -60 r/min P
This parameter is used to set the speed of fast reverse jogging which is triggered by reverse
jogging terminal and switching terminal of high-low jogging speed.
P6.05
Data size 16bit Data format DEC
Modbus address 2210, 2211 CANopen address 0x2605, 0x00
P6.06 Terminal JOG valid
Setting range Default Unit Available mode
0~1 0 - P
This parameter is used to set terminal JOG function:
Setting value Function
[0] Invalid
1 Valid
P6.06
Data size 16bit Data format DEC
Modbus address 2212, 2213 CANopen address 0x2606, 0x00
P6.20
1
Turret function switch
Setting range Default Unit Available mode
0~1 0 - P
This parameter is used to set turret function switch:
Setting value Function
[0] Disabled
1 Enabled
P6.20
1
Data size 16bit Data format DEC
Modbus address 2240, 2241 CANopen address 0x2614, 0x00

 Loading...
Loading...