SV-DA200 series AC servo drives Faults and solutions
‐130‐
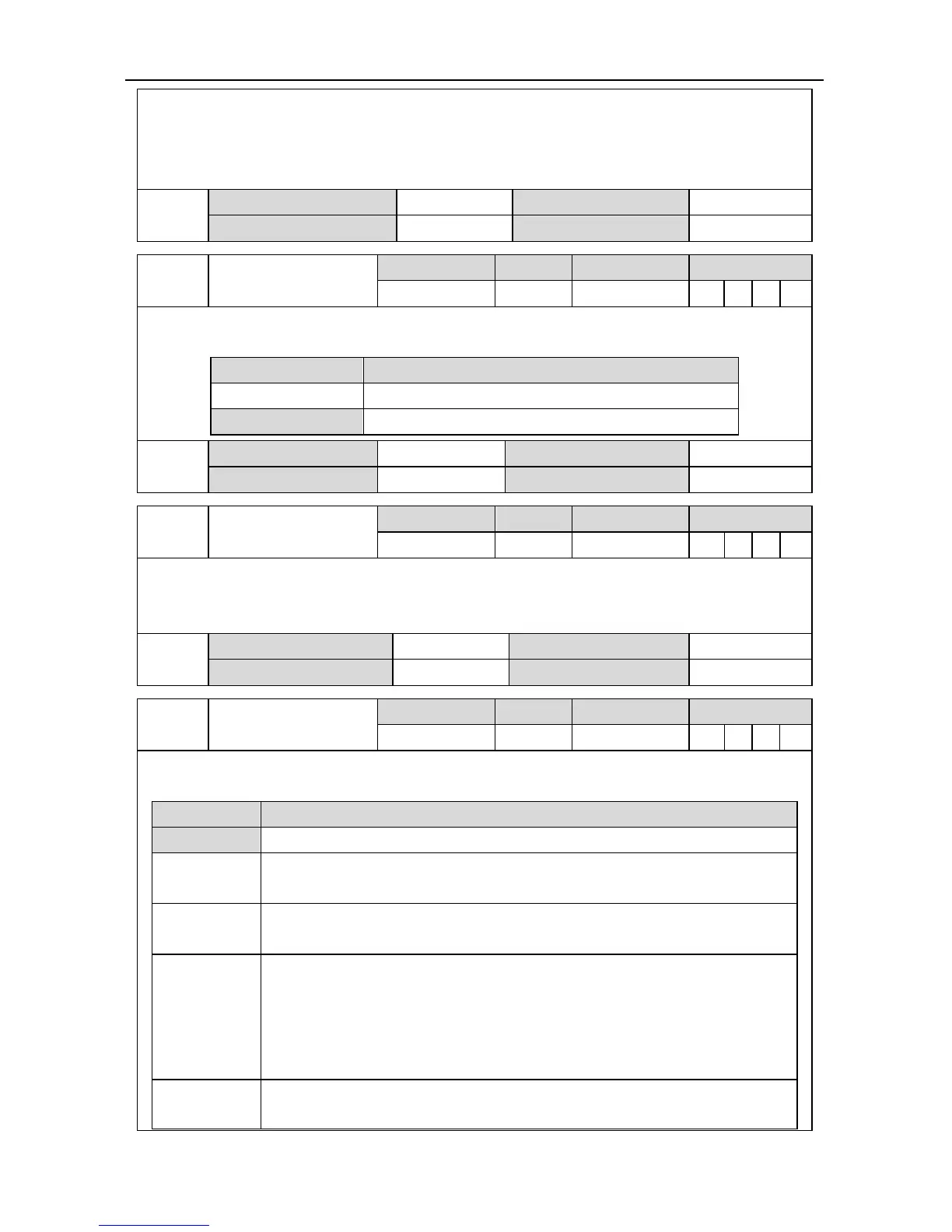
This parameter can set whether the digital input configured as command pulse disabling (0x008
or x0108) among P3.00~P3.09 is valid or not. If command pulse disabling function needs to be
blocked, this parameter will do the trick.
0:Valid; 1:Invalid
P3.44
Data size 16bit Data format DEC
Modbus address 1688,1689 CANopen address 0x232C,0x00
P3.45
1
Clearing mode of
retention pulse
Setting range Default Unit Available mode
0~1 1 - P F
This parameter is used to set valid mode of the digital input configured as RPC (0x007 or 0x107)
among P3.00~P3.09.
Setting value Function
0 ON Level clear
[1] Rising edge clear
P3.45
1
Data size 16bit Data format DEC
Modbus address 1690,1691 CANopen address 0x232D,0x00
P3.50
Range of position
arrival
Setting range Default Unit Available mode
0~2
18
100 reference unit P F
This parameter is used to set the range of position arrival. When the deviation between the
position feedback pulse and position command pulse is in this range, it indicates position
arrival.
P3.50
Data size 32bit Data format DEC
Modbus address 1700,1701 CANopen address 0x2332,0x00
P3.51
Output mode of
position arrival
Setting range Default Unit Available mode
0~4 0 - P F
This parameter can be used to set the condition for the position arrival output signal and the
action mode after output.
Setting value Output mode
[0] Output is valid if the position deviation is within the range of P3.50.
1
Output is valid when there is no position command and the position deviation
is within the range of P3.50.
2
Output is valid when when there is no position command, the zero speed
detection signal is valid and position deviation is within the range of P3.50.
3
Output is valid when transiting from the position command to no position
command and the position deviation is within the range of P3.50. And then,
valid state of output continues until passing the time set by P3.52, after that,
updates the position arrival output state according to the position command
and the position deviation.
4
Output is valid when transiting from position command to no position
command while position deviation is within P3.50. Thereafter, the valid state
 Loading...
Loading...
