SV-DA200 series AC servo drives Faults and solutions
‐85‐
P0.05
Data size 16bit Data format DEC
Modbus address 1010,1011 CANopen address 0x2005, 0x00
P0.06
1
Numerator of frequency
division output coefficient
Setting range Default Unit Available mode
0~(2
31
-1) 10000 - P S T F
P0.07
1
Denominator of frequency
division output coefficient
Setting range Default Unit Available mode
1~(2
31
-1) 131072 - P S T F
By setting the numerator and denominator of the frequency division output, the signal of the
encoder can be frequency divided by any integer or decimal fraction and then outputted through
the encoder’s pulse output signal terminals(OA+, OA-, OB+ and OB- pin “44”“43”“41” and “42”)
Note:
1. In the position control mode, if the encoder output signal of the preceding stage servo motor
is used as the position pulse command input of the succeeding stage servo drive, i.e. as
start/stop type master-slave follow-up, in order to ensure high positioning accuracy of the
succeeding stage servo drive, the frequency division coefficient must be 1:1. Otherwise the
accuracy of master-slave position follow-up will be affected in this case.
2. In factory setting, P0.07 is 131072, P0.06 is 10000, which means the output terminal of the
encoder will output 10000 pulse signal when the motor rotates a circle. If P0.06 is 5000, the
output terminal of the encoder will output 5000 pulse signal.
P0.06
1
Data size 32bit Data format DEC
Modbus address 1012,1013 CANopen address 0x2006, 0x00
P0.07
1
Data size 32bit Data format DEC
Modbus address 1014,1015 CANopen address 0x2007, 0x00
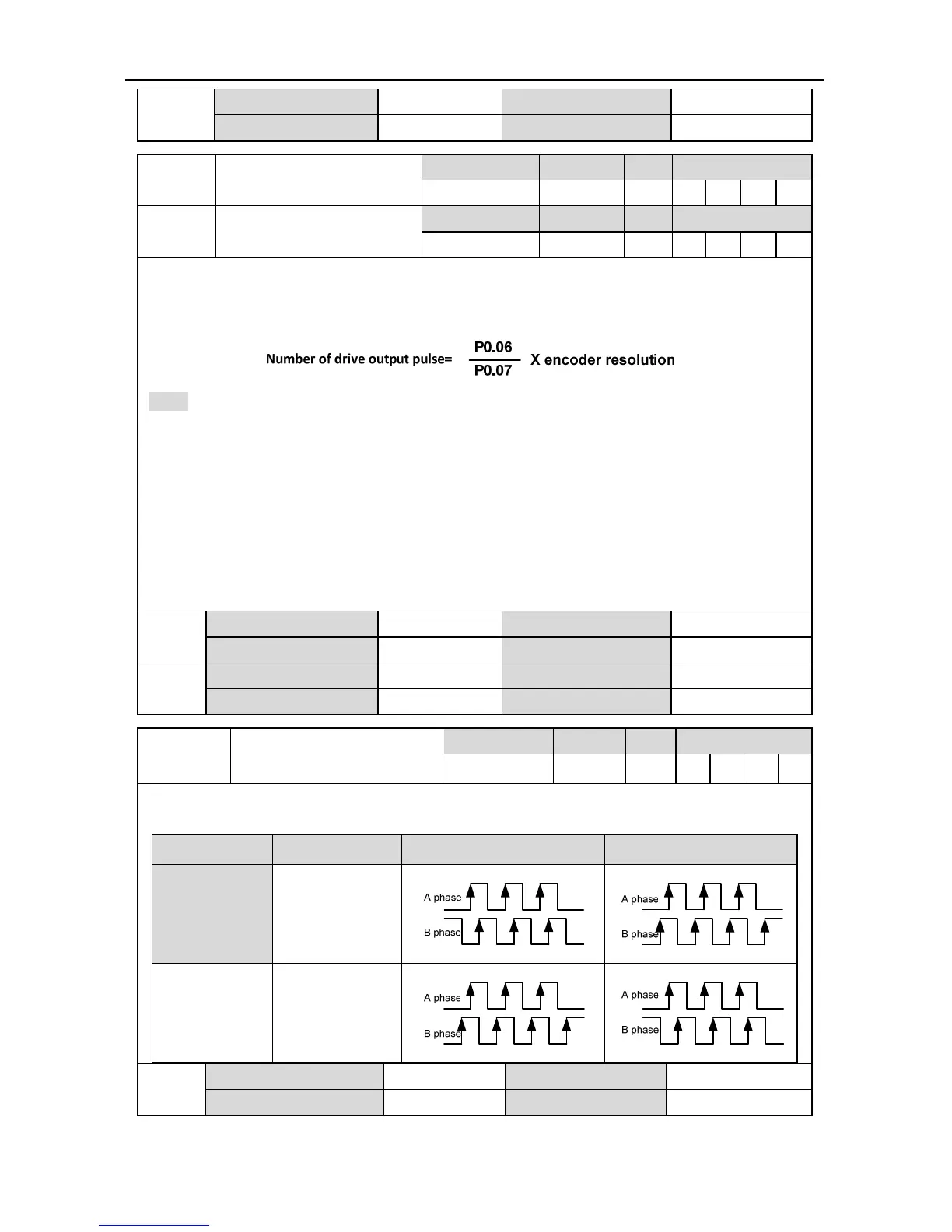
P0.08
1
Reverse of frequency division
output
Setting range Default Unit Available mode
0~1 0 - P S T F
The reverse of B phase can be carried out through this parameter and the phase relation between
A phase and B phase can be changed:
Setting value Logic of B phase CCW CW
[0] Non-reverse
1 Reverse
P0.08
1
Data size 16bit Data format DEC
Modbus address 1016,1017 CANopen address 0x2008, 0x00
 Loading...
Loading...
