SV-DA200 series AC servo drives Faults and solutions
‐86‐
P0.09
Torque limit mode
setting
Setting range Default Unit Available mode
0~6 1 - P S F
This parameter is used to set the torque limit mode.
In speed mode, the analog input 3 is set to the torque limit, and:
Setting value Forward direction Reverse direction
0 Analog input 3(0V~10V) Analog torque command (-10V~0V)
[1] Max. torque limit 1(P0.10)
2 Max. torque limit 1(P0.10) Max. torque limit 2(P0.11)
3
TLC OFF →Max. torque limit 1(P0.10)
TLC ON → Max. torque limit 2(P0.11)
4 Analog input 3(0V~10V) Analog torque command (0V~10V)
5 Analog input 3(0~10V)
6 Analog torque command (0V~10V)
If analog input 3 is the speed input (non-torque limit), the meaning of the parameter is as below:
Setting value Forward direction Reverse direction
0 0 Analog torque command (-10V~0V)
[1] Max. torque limit 1(P0.10)
2 Max. torque limit 1(P0.10) Max. torque limit 2(P0.11)
3
TLC OFF → Max. torque limit 1(P0.10)
TLC ON → Max. torque limit 2(P0.11)
4 0 Analog torque command (0V~10V)
5 0
6 Analog torque command (0V~10V)
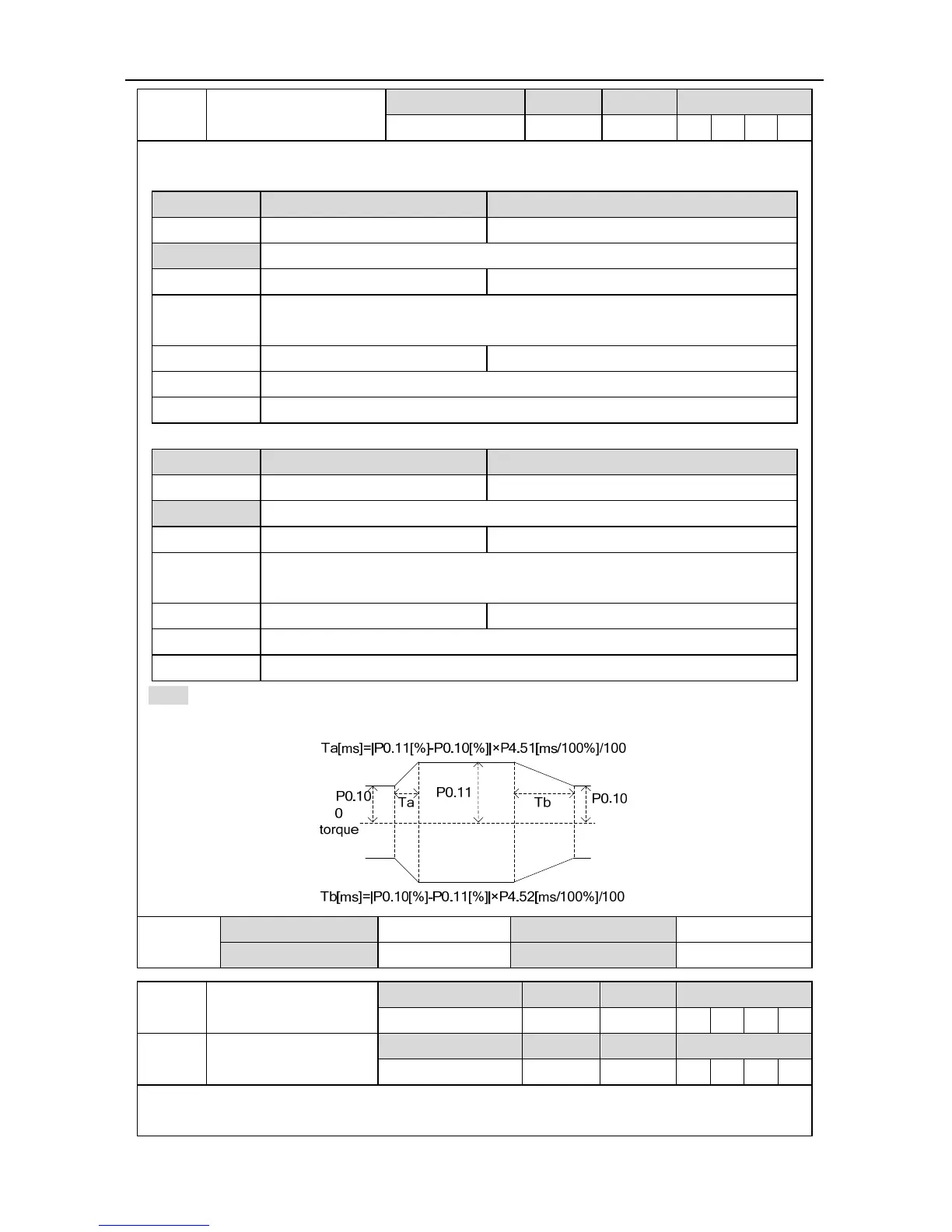
Note: If P0.09 is 3, the torque switching is not valid instantly and is limited by P4.51 and P4.52,
the detailed information is as the figure below:
P0.09
Data size 16bit Data format DEC
Modbus address 1018,1019 CANopen address 0x2009, 0x00
P0.10 Max torque limit 1
Setting range Default Unit Available mode
0.0~500.0 300.0 % P S T F
P0.11 Max torque limit 2
Setting range Default Unit Available mode
0.0~500.0 300.0 % P S F
These parameters can be used to set the maximum torque of the servo motor output. Taking the
rated torque of the servo motor as 100%, the setting is the percentage of the rated torque of the
 Loading...
Loading...
