4-1
4.1
USE OF NAVIGATION TOOLS
The system is equipped with the navigation tools as below.
Cursor
Specifies an arbitrary point, and measures the range and bearing from the own ship.
Range Rings
Displays concentric circles with own ship's position as the center at specified intervals, and the rings are
used as rough guides for range measurement.
Electronic Bearing Line (EBL1/2)
Displays a straight line for specifying an arbitrary bearing, and measures the bearing from the own ship.
The processing unit is equipped with two electronic bearing lines.
Variable Range Marker (VRM1/2)
Displays a circle for specifying an arbitrary range, and measures the range from the own ship.
The processing unit is equipped with two variable range markers.
Parallel Index Line (PI)
Displays straight lines at even intervals, and the lines are used as rough guides for complex measurement
or ship courses.
EBL Maneuver
Displays the course by steering the own ship, and it is used as a rough guide for ship maneuvering.
Man Overboard
Stores the latitude and longitude where the own ship was at the point of storing the markers, and shows
an anchor symbol on the radar display. When the own ship has moved, the system displays the range and
bearing to the position.
Use this tool when the ship is anchored or man overboard.
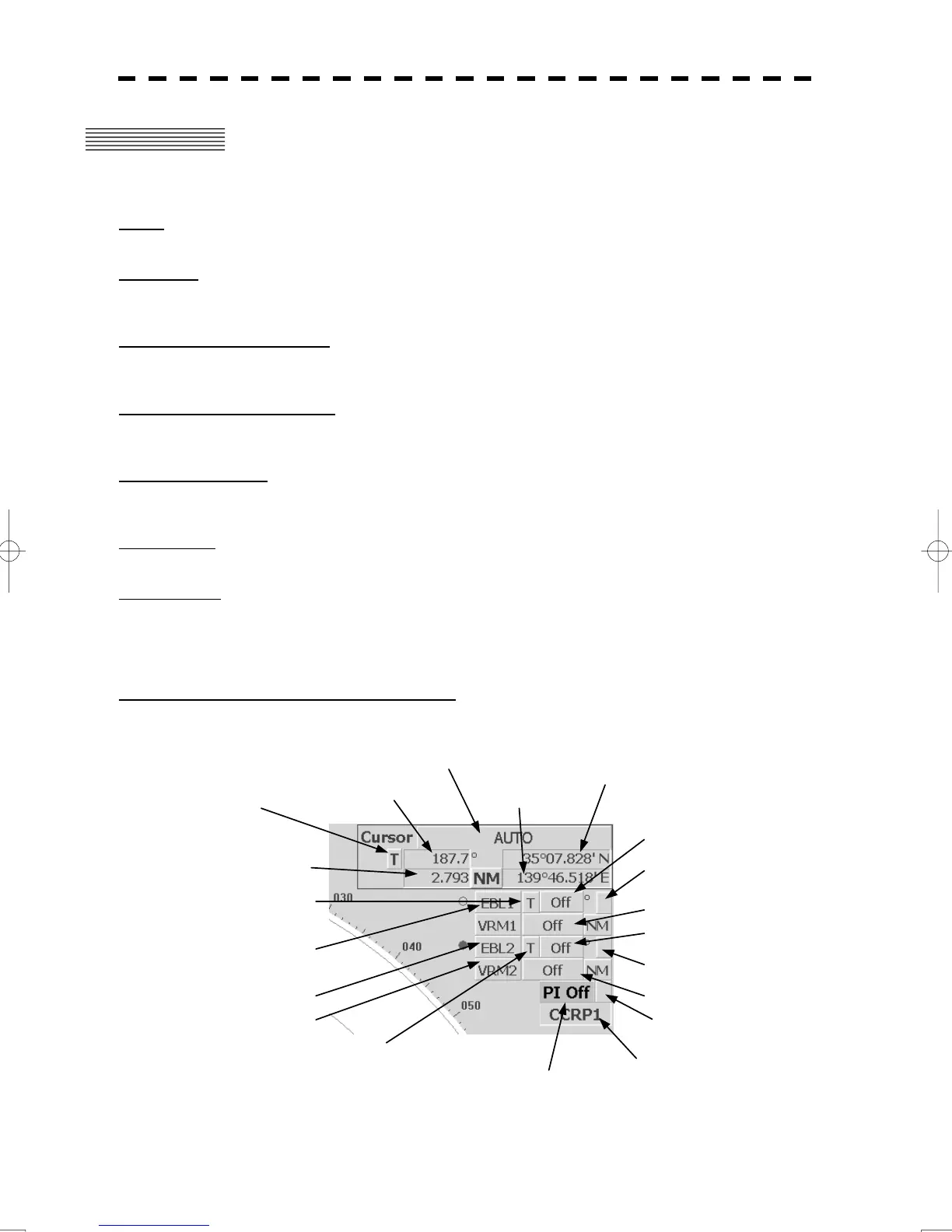
EBL/VRM/PI Operation with Cursor (Cursor AUTO)
Operates EBL, VRM, or PI on the radar display by using the cursor.
EBL1 numeric value indication
true/relative
EBL1 On/Off
VRM1 On/Off
EBL2 On/Off
VRM2 On/Off
EBL1 bearing
VRM1 range
EBL1
starting point mode
EBL2 bearing
VRM2 range
EBL2
starting point mode
Consistent Common
Reference Point (CCRP)
Cursor longitude
Cursor latitude
Cursor mode
Cursor bearing
Cursor range
Cursor bearing
numeric value indication
true/relative
EBL2 numeric value indication true/relative
Parallel index line
On/Off
Parallel index line
starting point mode
 Loading...
Loading...






