6
11 3
KEB COMBIVERT F5-G / B
Name: Basis
6
05.02.02
Section PageDate
© KEB Antriebstechnik, 2002
All rights reserved
Chapter
Functional DescriptionRegulated Operation
6.11 SSM
The SMM-function (sensorless motor management) includes the torque and slip
compensation. Precondition for a good control characteristic is the input of the motor
data in the dr-parameters (see Chapter 6.6).
Torque compensation adapts the voltage at variable load torques in such a way that
the magnetizing current setpoint is kept constant. With it a higher maximum torque is
achieved at small output frequencies compared to uncompensated operation.
With uF.16 and uF.17 the torque compensation is activated and configured. The
magnetizing current setpoint and actual value are calculated in the motor model. With
uF.7 the magnetizing current setpoint can be adjusted to the application.
Attention! Through overcompensation increased motor currents can occur
particularly with small frequencies.
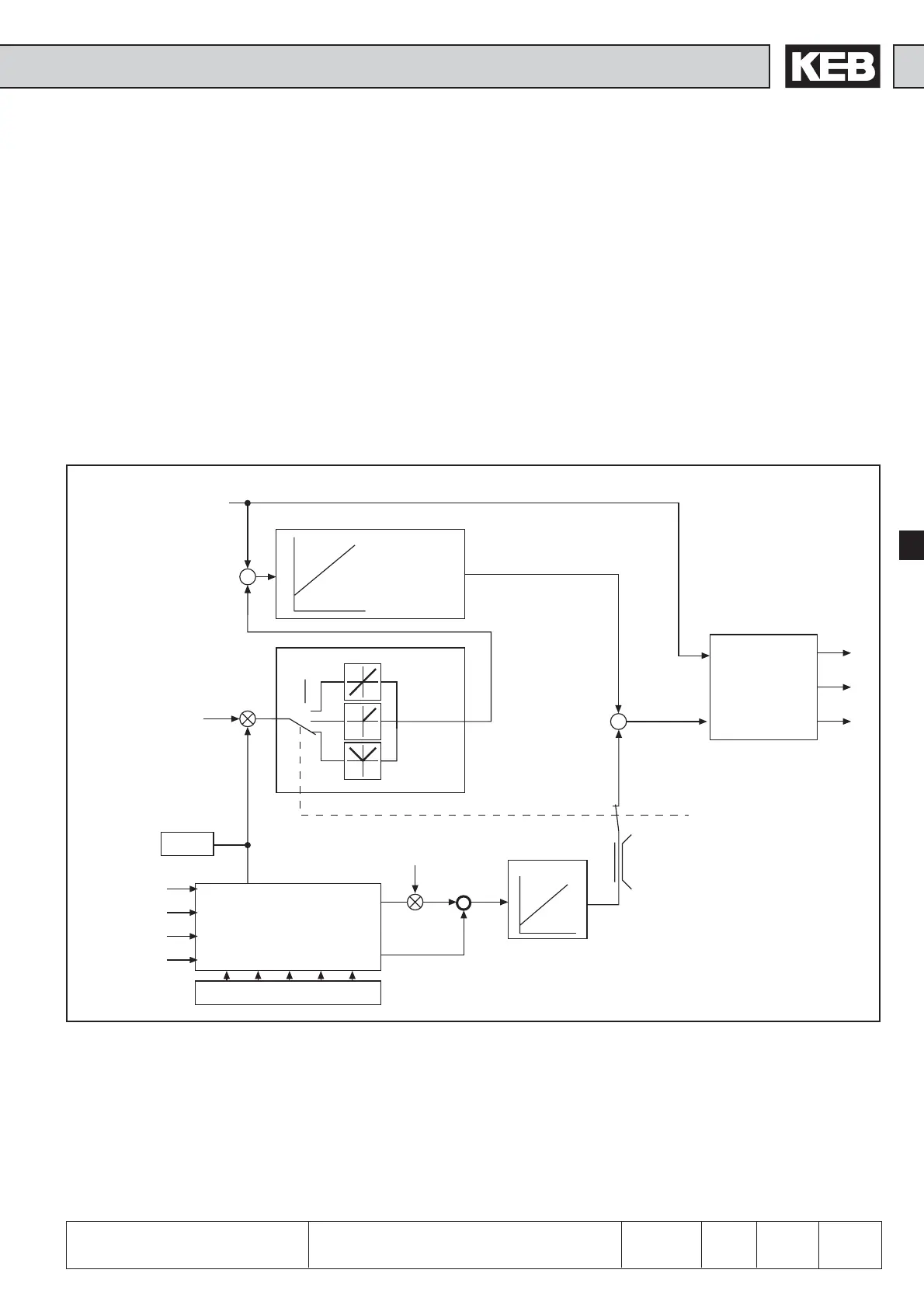
6.11.1 Torque
Compensation
uF.17
+
uF.16
1, 2, 30
PI
uF.7
I
U
I
V
phi
(U)
U
-
0 25%
ru.17
0
1
2
3
M->f
f->U
+
PWM
+
+
real
frequency
magnetizing current
set value
6.11.1Torque compensation
Motordata
The motor data is entered in the parameters dr.0...dr.6 as described in Chapter 6.6.
Energy saving factor (uF.7)
In the case of activated torque compensation this parameter is used for the optimization
of the magnetizing current setpoint to the application. If a drive operates for a long
time in the partial-load range the motor heating and the energy consumption can be
reduced by decreasing this factor.
The energy saving function is switched off at activated torque compensation.
magnetizing current
real value
Motor model
Motor data
(off)
off