6 11
KEB COMBIVERT F5-G / B
4
Name: Basis
05.02.02
Chapter Section Page Date
© KEB Antriebstechnik, 2002
All rights reserved
Functional Description Regulated Operation
CS.4
012
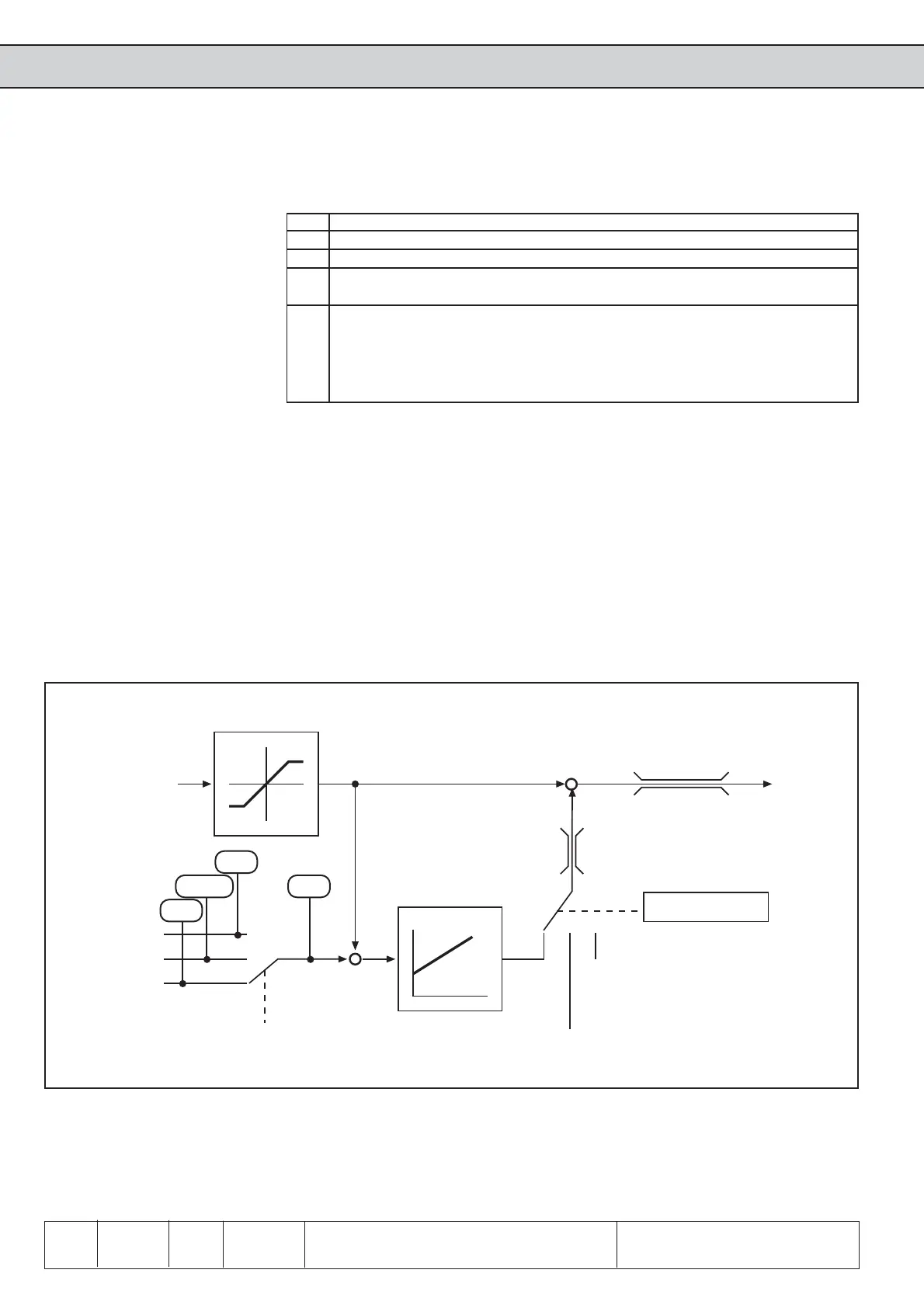
CS.0 Bit 0, 1 = 2
KP=CS.6
KI=CS.9
+
-
oP.40 / 41
oP.36 / 37
CS.1
ru.7
ru.4/9
ru.5/10
ru.6
6.11.2 Speed Control
The integrated speed controller is used at cS.0 = „2“ for the slip compensation. Slip
compensation compensates the speed changes caused through load changes by
increasing/decreasing the output frequency (ru.3). With that a higher speed stability is
achieved.
If one determines during operation that the drive constantly overcompensates, it can
be balanced by a slight increase of the rated speed.
frequency
calculation
Technologie control
(Capter 6.12)
f_ramp
real
frequency
6.11.2 Drehzahlregler
Parameter uF.16 defines the basic controller structure.
Dec. Meaning
0 Torque compensation off
1 Torque compensation acts motoric and generatoric
2 Torque compensation works only in the motoric operation; resulting in a smoother
run in the generatoric operation.
3 Torque compensation in motoric operation; overcompensation in the generatoric
operation; resulting in a higher maximum torque and increased current in the
generatoric operation compared to 1 and 2; because of the higher motor-own
losses a braking resistor is only necessary at higher energy recovery compared
to 0, 1 and 2.
Torque compensation/
configuration (uF.16)
Torque compensation /
amplification (uF.17)
With uF.17 the amplification is adjusted within the range of 0.00...2.50.
Ramp generator
Channel 2
Channel 1
(only at F5-General
upon housing size D)