Page 7.5 - 18 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Motor data and controller adjustments of the asynchronous motor
7.5.2.3.1.3 Singleidentication
Single identications should not be used for the rst measurement of the motor parameters, since invalid
measuring results can occur in case of a wrong identication sequence or omitting of individual points.
Single identication can always be used if a complete automatic measurement was executed and only indivi-
dual parameters shall be identied. For example this can be a resistance measurement in warm condition or a
new measurement of main inductance after changing parameter dr.19 "factor ux adaption".
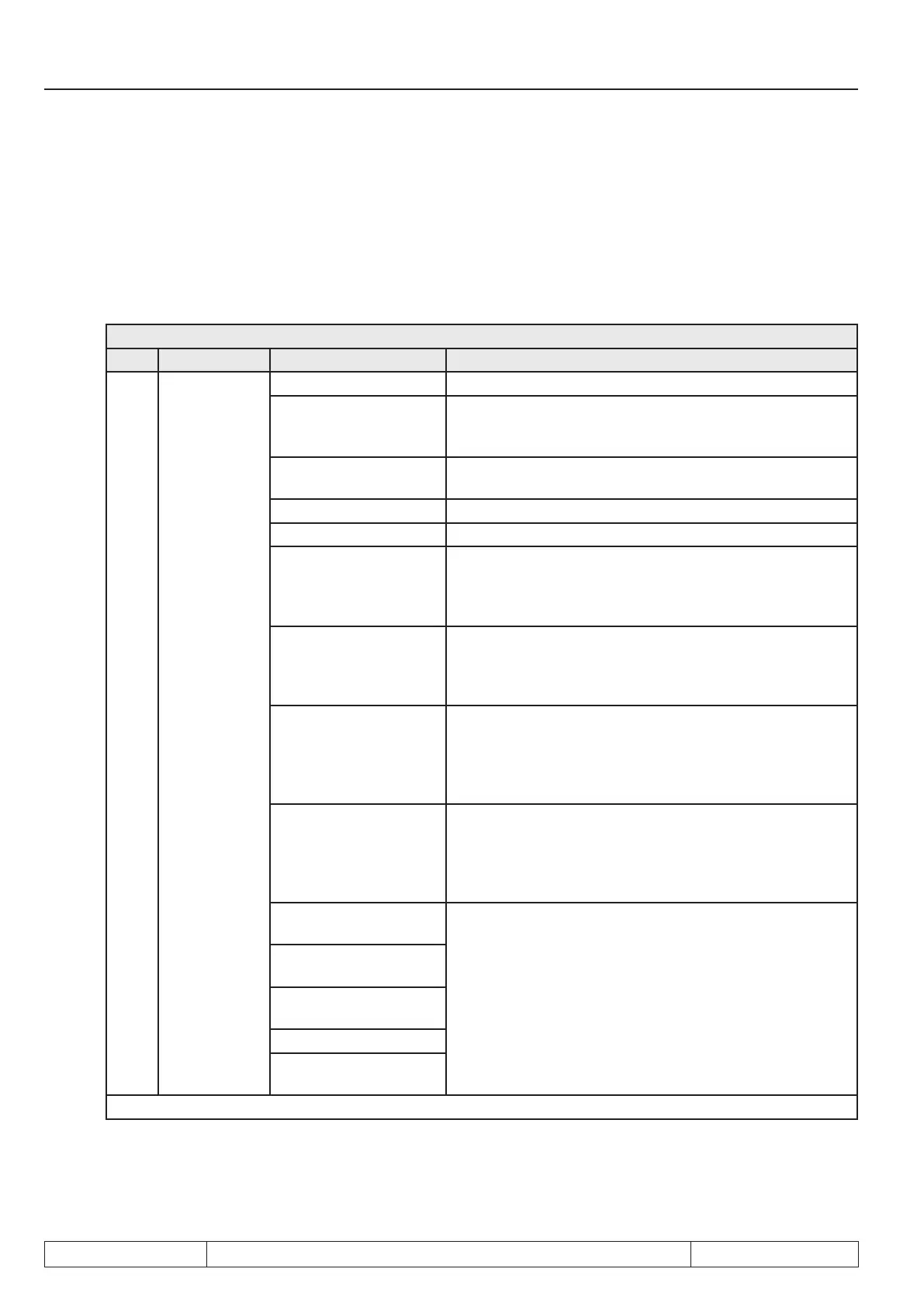
dr.48motoridentication
Bit Description Value Function
0...4 Measurement
0: off
1: Calculation of the
main inductance
(ASM)/ EMC (SM)*
Precharging of the current controller parameters and main
inductance from rating plate data
2: Leakage (ASM)/ win-
ding inductance (SM)*
Measurement of the leakage inductance
3: Stator resistance Rs* Measurement of the stator resistance
4: Rotor resistance Rr * Measurement of the rotor resistance
5: Model-/controller
parameterisation *
Based on the equivalent circuit data, the model parame-
ters and the setting of the controller are determined in the
dS-parameters (current-, ux-, and speed calculation con-
troller)
6: Main inductance
(ASM)/ EMC (SM) !with
rotation! *
!Attention: Requires motor revolution in no-load ope-
ration!
Measurement of the main inductance at "speed for Mmax"
(dr.17)
7: Auto ident. without
main inductance (ASM)
/ EMC (SM) !without
rotation!
automatic measurement of the dead time characteristic
and of all equivalent circuit data - with the exception of the
main inductance. This measurement is carried out with the
motor stopped, but a rotation of the motor due to the test
signals is possible.
8: complete AutoIdenti-
cation !with rotation!
!Attention: Requires motor revolution in no-load ope-
ration!
automatic measurement of the dead time characteristic and
of all equivalent circuit data - including main inductance.
The motor accelerates to "speed for Mmax" (dr.17)
9: Dead time detection
2 kHz *
Measurement of dead time compensation characteristics
for different switching frequencies
10: Dead time detec-
tion 4kHz *
11: Dead time detection
8kHz *
12: reserved
13: Dead time detection
16 kHz *
further on next side
 Loading...
Loading...


