Motor data and controller adjustments of the synchronous motor
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.6 - 11
7
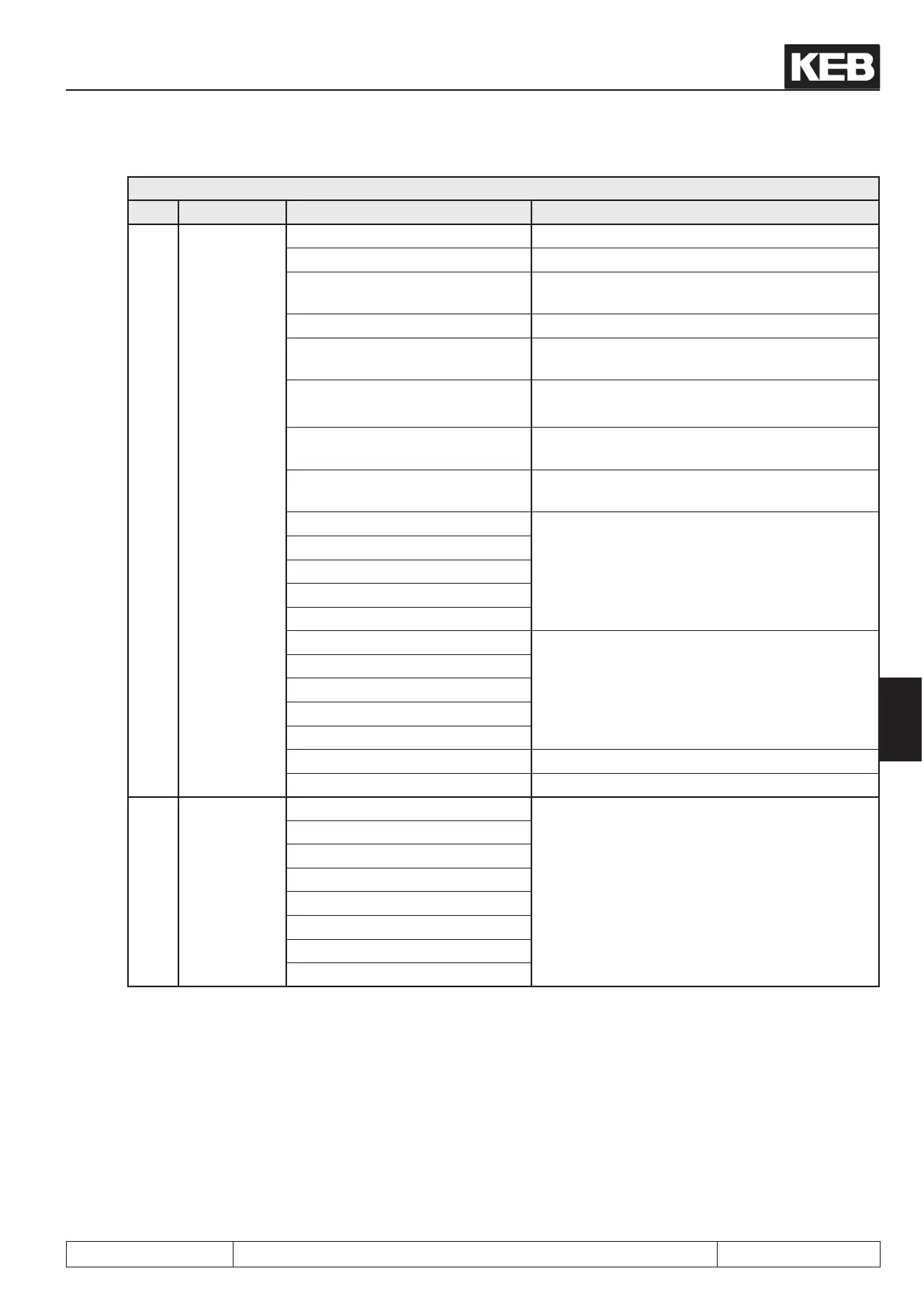
dr.48Motoridentication
Bit Description Value Function
0...4 Measurement
0: off
1: Calculation EMC * Calculation of the EMC from motor data
2: Inductance * Measurement of the winding inductance respec-
tively
3: Resistance * Winding resistance
5: Model-/controller parameterisa-
tion *
Calculation of the current controller from equiva-
lent circuit data
6: EMC with rotation *
Attention: requires motor rotation!
EMC measurement
7: Automatically sequence without
rotation
Start of the automatic measurement without EMC
8: Automatically sequence with
rotation
Start of the automatic measurement with EMC
9: Dead time detection 2 kHz *
Measurement of dead time compensation cha-
racteristics for different switching frequencies
10: Dead time detection 4 kHz *
11: Dead time detection 8 kHz *
12: reserved
13: Dead time detection 16 kHz *
14: Torque detection 2 kHz
Detection of the no-load torque at different swit-
ching frequencies. During operation this torque is
subtracted from torque display ru.12.
15: Torque detection 4 kHz
16: Torque detection 8 kHz
17: reserved
18: Torque detection 16 kHz
19: Current offset detection Detection of the current offset in phase U and V
20: reserved
5...7 Frequency
0: 1000Hz
The measuring frequency is changed indepen-
dently during measurement.
Therefore, leave the value at 0: keep 1000Hz!
32: 500Hz
64: 250Hz
96: 125Hz
128: 62.5Hz
160: 32.25Hz
192: 15.625Hz
224: 7.8125Hz
* at dr.48 = 8 auto-identication
7.6.3.3.1 Auto-identication
The automatic identication can be carried out with rotation (dr.48=8) or without rotation (dr.48 = 7) (see table
dr.48). The measurement of the dead time compensation characteristics as well as stator resistance and lea-
kage inductance occurs during standstill.
For EMC identication it is necessary to accelerate the motor onto 60% of its rated speed. For this case an
additional ramp of dr.49 "Lh ident. acc/dec time" is effective". Calculation of the ramp can be taken from chapter
7.6.3.4.
 Loading...
Loading...


