Chapter 2 - Operator Gimbal Menu TM00358 Rev. A
October 2007 L-3 WESCAM
40 All Rights Reserved
2.10 OPERATOR GIMBAL MENU
The Operator Gimbal menu provides status information and controls to:
• Configure the sensitivity of turret movement
• Setup and initiate an automated steering pattern
• Eliminate steering drift with an Auto Null command
To customize the control sensitivity of the Hand Controller, operators can alter the drive direction or change various
steering preferences to either increase or decrease the pressure needed to cause turret movement. For example,
forward and back steering positions can be reversed. As well, operators might increase the left to right azimuth
speed for quicker panning movements, and decrease the up and down elevation speed to improve following targets
moving along a horizontal path. Optionally, the operator could set the turret to a fixed position in degrees of azimuth
and elevation and hold that position with no movement.
To turn over steering control to an automated sweep pattern, operators would enable the Autoscan feature. For
example, Autoscan is useful in search and rescue missions where the plane is flying a search grid. To ensure
complete video capture, Autoscan can be set up for a turret sweep that overlaps the previous flight corridor.
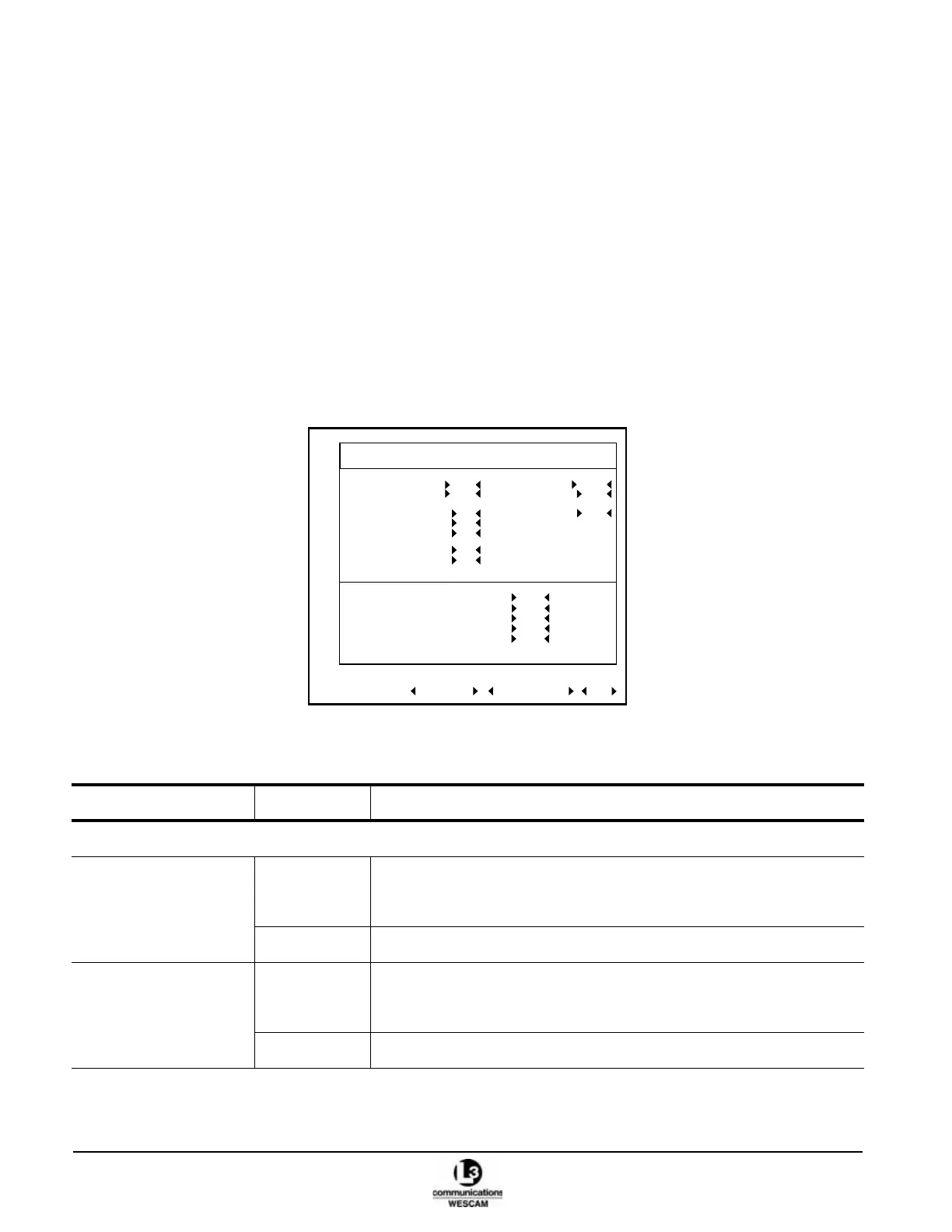
Figure 2-27 Level 2 Operator Gimbal Menu
Table 2-11 Status Information and Controls in the Level 2 Operator Gimbal Menu
Field Values Description
VALUE FIELDS
AZIMUTH SENSE NORM Sets the azimuth (horizontal) steering orientation for the user control:
• Rightward pressure causes positive horizontal steering movement.
• Leftward pressure causes negative horizontal steering movement.
REV Reverses the normal steering movements.
ELEVATION SENSE NORM Sets the elevation (vertical) steering orientation for the user control:
• Backward pressure causes positive vertical steering movement.
• Forward pressure causes negative vertical steering movement.
REV Reverses the normal steering movements.
LEVEL 2 - OPERATOR GIMBAL
AZIMUTH SENSE NORM AZIMUTH FWD 0
ELEVATION SENSE NORM ELEVATION FWD -4
ZOOM MULTIPLIER OFF STEERING FLTR 75
ZOOM MULT AZ GAIN 10
ZOOM MULT EL GAIN 5
AUTO NULL FACTORY DFLT DONE
AZIMUTH GAIN 50
ELEVATION GAIN 25
AUTOSCAN OFF
AUTOSCAN AZIMUTH CENTER 0
AUTOSCAN ELEVATION CENTER -4
AUTOSCAN WIDTH 30
AUTOSCAN RATE 5.0