Lite-On Technology Corp.
Industrial Automation
41
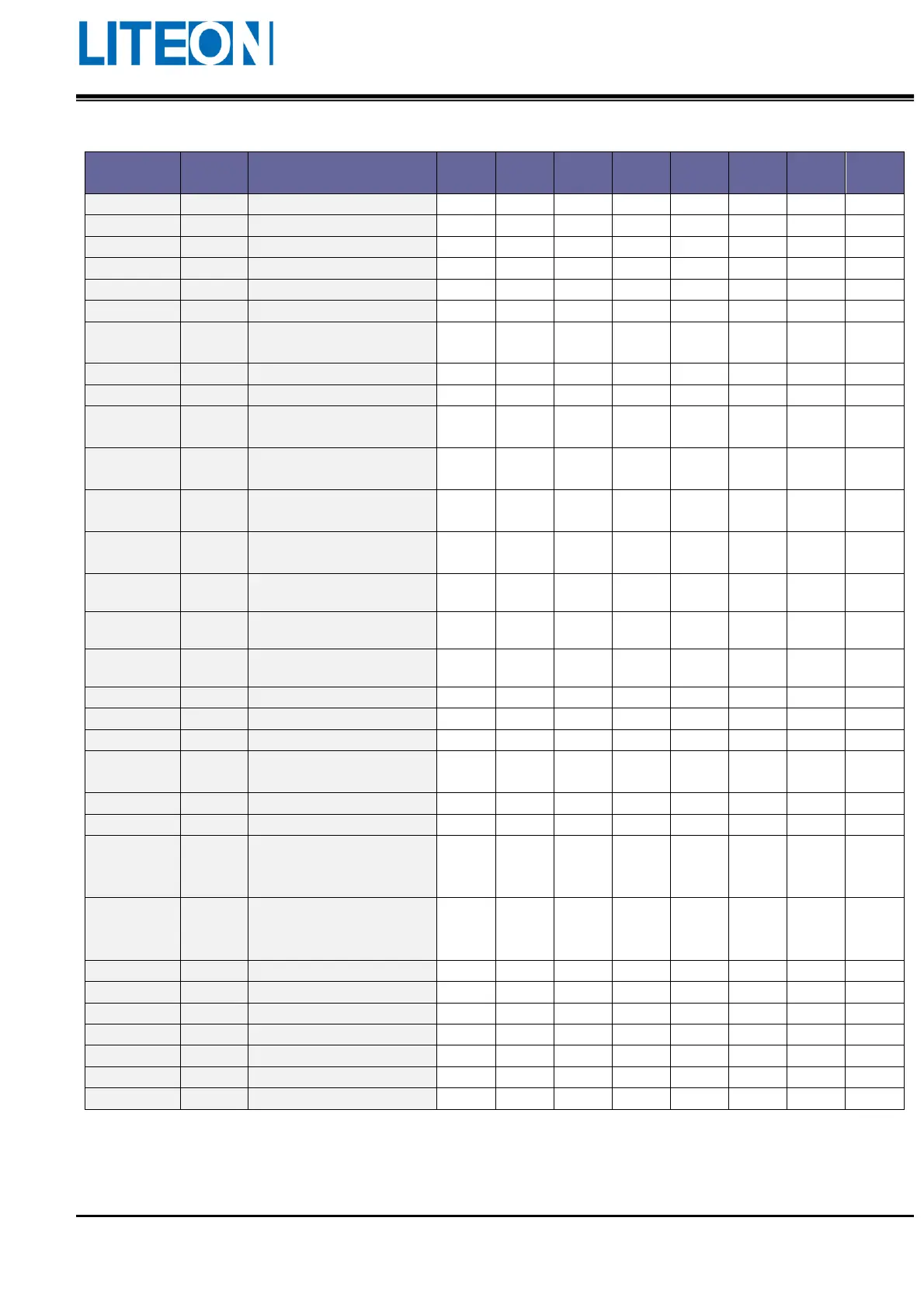
The default DIs and DOs under each operating mode are arranged as follows:
Table for definitions of the default DI input
Command input reverse
control
Selection of Speed
Command 0
Selection of Speed
Command 1
Selection of Torque
Command 0
Selection of Torque
Command 1
Switching of the
speed/position mixed mode
Switching of the speed/torque
mixed mode
Switching of the
torque/position mixed mode
Limit of reverse inhibition
Limit of forward inhibition
Selection of the jog control
for the terminal
Selection of the Numerator
of the Electronic Gear
Ratio 0
Selection of the Numerator
of the Electronic Gear
Ratio 1
 Loading...
Loading...