Technical Bulletin—TC-9100 Universal Controller 31
The parameters that are dynamically generated by programmable
modules configured to use controller algorithms are listed below:
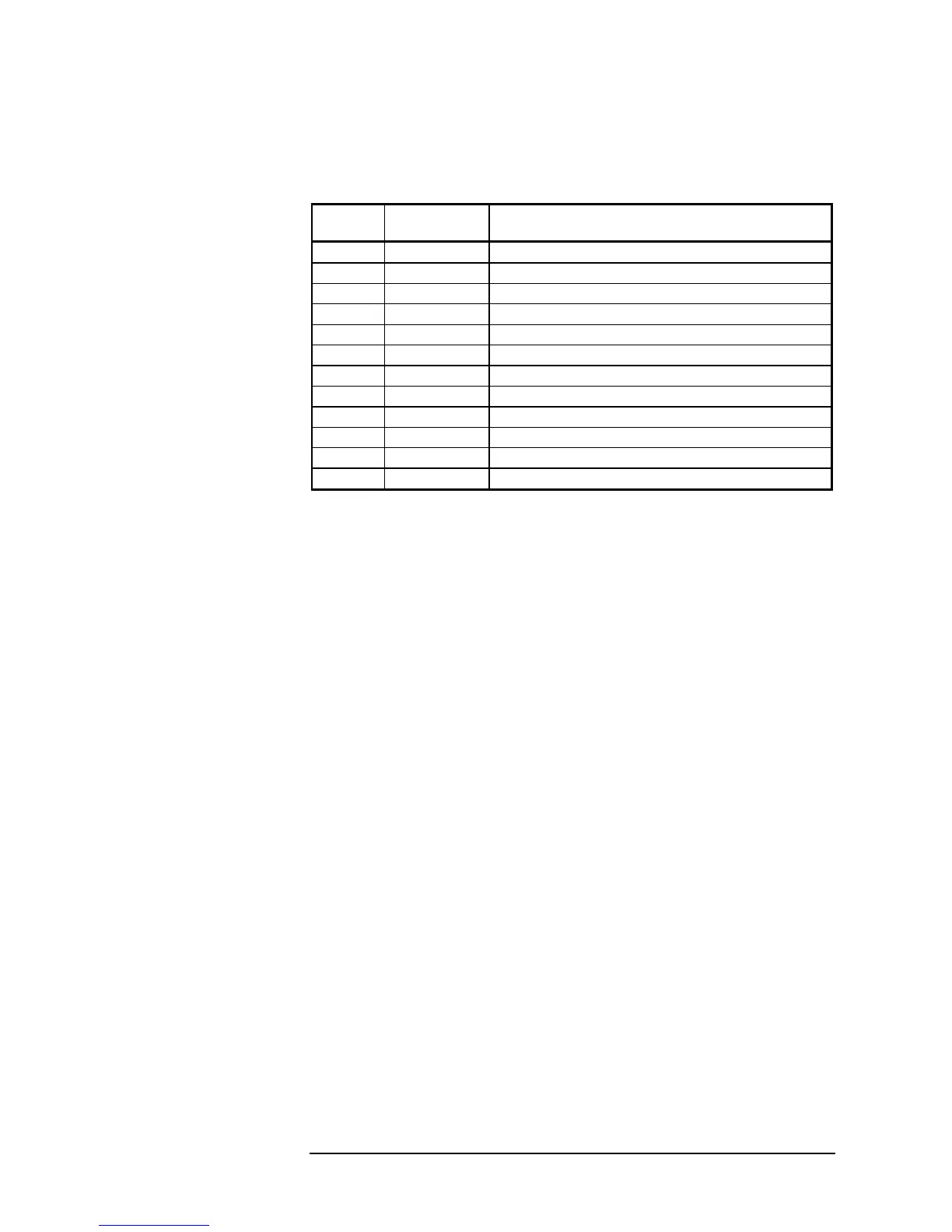
Table 12: Programmable Module Dynamic Items for Controller
Algorithms
Item Tag Item Address
(Hex/Dec)
Description
OCM1 0A/10 Output of Programmable Module 1
OCM2 0B/11 Output of Programmable Module 2
OCM3 0C/12 Output of Programmable Module 3
OCM4 0D/13 Output of Programmable Module 4
OCM5 0E/14 Output of Programmable Module 5
OCM6 0F/15 Output of Programmable Module 6
WSP1 10/16 Working Set Point of Control Module 1
WSP2 11/17 Working Set Point of Control Module 2
WSP3 12/18 Working Set Point of Control Module 3
WSP4 13/19 Working Set Point of Control Module 4
WSP5 14/20 Working Set Point of Control Module 5
WSP6 15/21 Working Set Point of Control Module 6
When a programmable module is configured as Algorithm 1 (Item
PMxTYP, bits 5…1 = 00001), the module performs the function of an
on/off controller.
When a programmable module is configured as Algorithm 2 (Item
PMxTYP, bits 5…1 = 00010), the module performs the function of a PI
controller.
When a programmable module is configured as Algorithm 3 (Item
PMxTYP, bits 5…1 = 00011), the module works with the next
programmable module (PMx
+1
) as a heating/cooling on/off controller
with a single output. The output of the second module (Loop 2) follows
the output of the first module (Loop 1).
Loop 1 must be configured as a heating controller (reverse acting) and its
working set point must always be lower than the working set point of
Loop 2, which must be configured as a cooling controller (direct acting).
The two modules share the process variable of Loop 1. Loop 1 is active
when the process variable is below the working set point of Loop 1, and
Loop 2 is active when the process variable is above the working set point
of Loop 2. The changeover takes place in the center of the control dead-
band between the two loops with a 10% switching differential.
Dynamic
Parameters for
Controller
Algorithms
Algorithm 1:
On/Off Controller
Algorithm 2:
PI Controller
Algorithm 3:
Heating/Cooling
On/Off Controller
– Single Output

 Loading...
Loading...