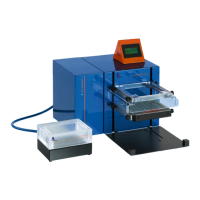
3 Manually adjust the robotic needle arm in order to position the uptake needle over the center of the port.
4 Gently lower the robotic needle arm manually into the port until the uptake needle touches the bottom of
the port. Do not bend the needle or insert it diagonally.
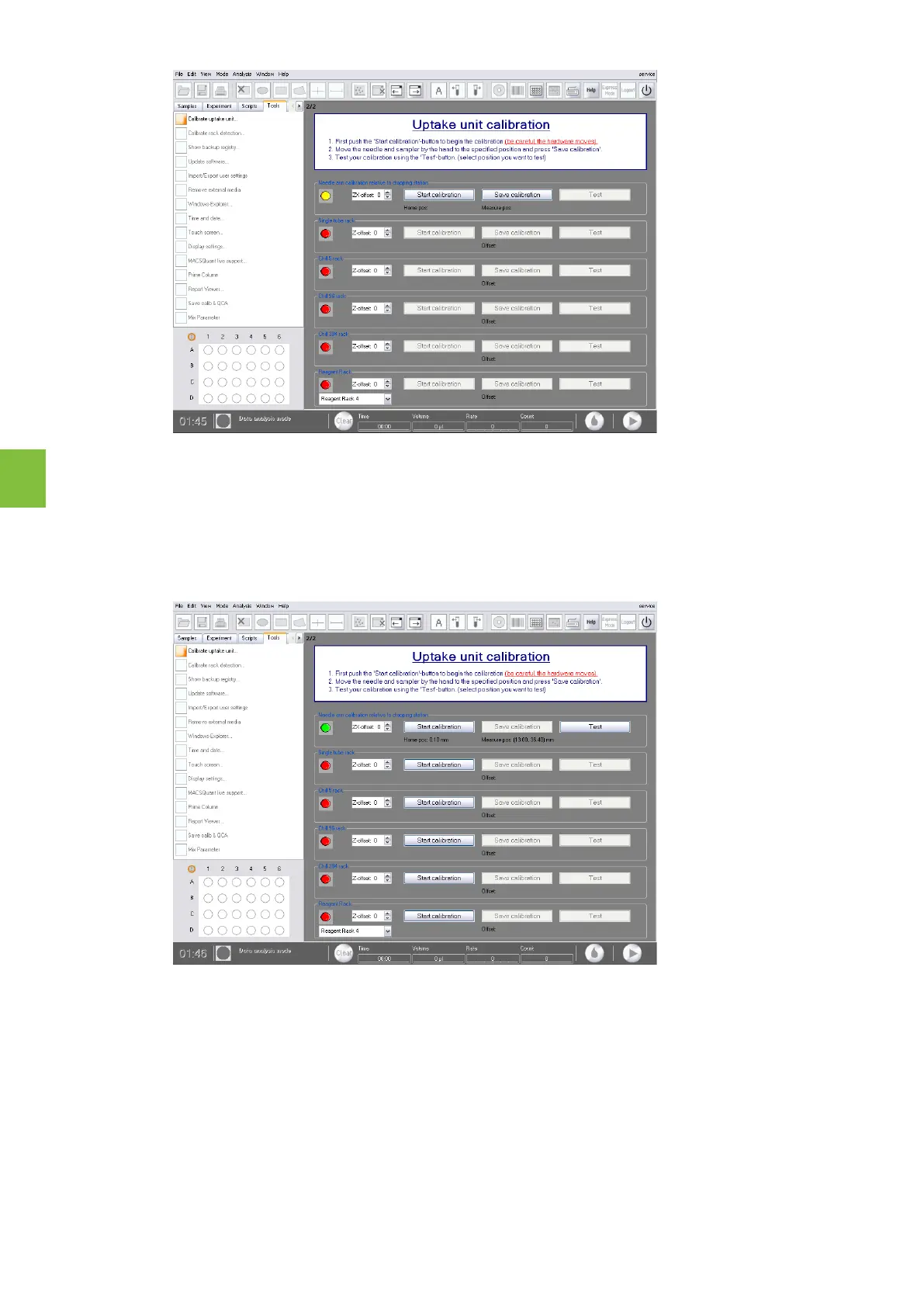
5 Click Save calibration.
6 The closed green circle indicates that the calibration is completed. Click Test to confirm that the correct
coordinates are saved.
4
CALIBRATION
62
 Loading...
Loading...