Move robot in JOG mode Operation of Teaching Box R32TB
6 - 10
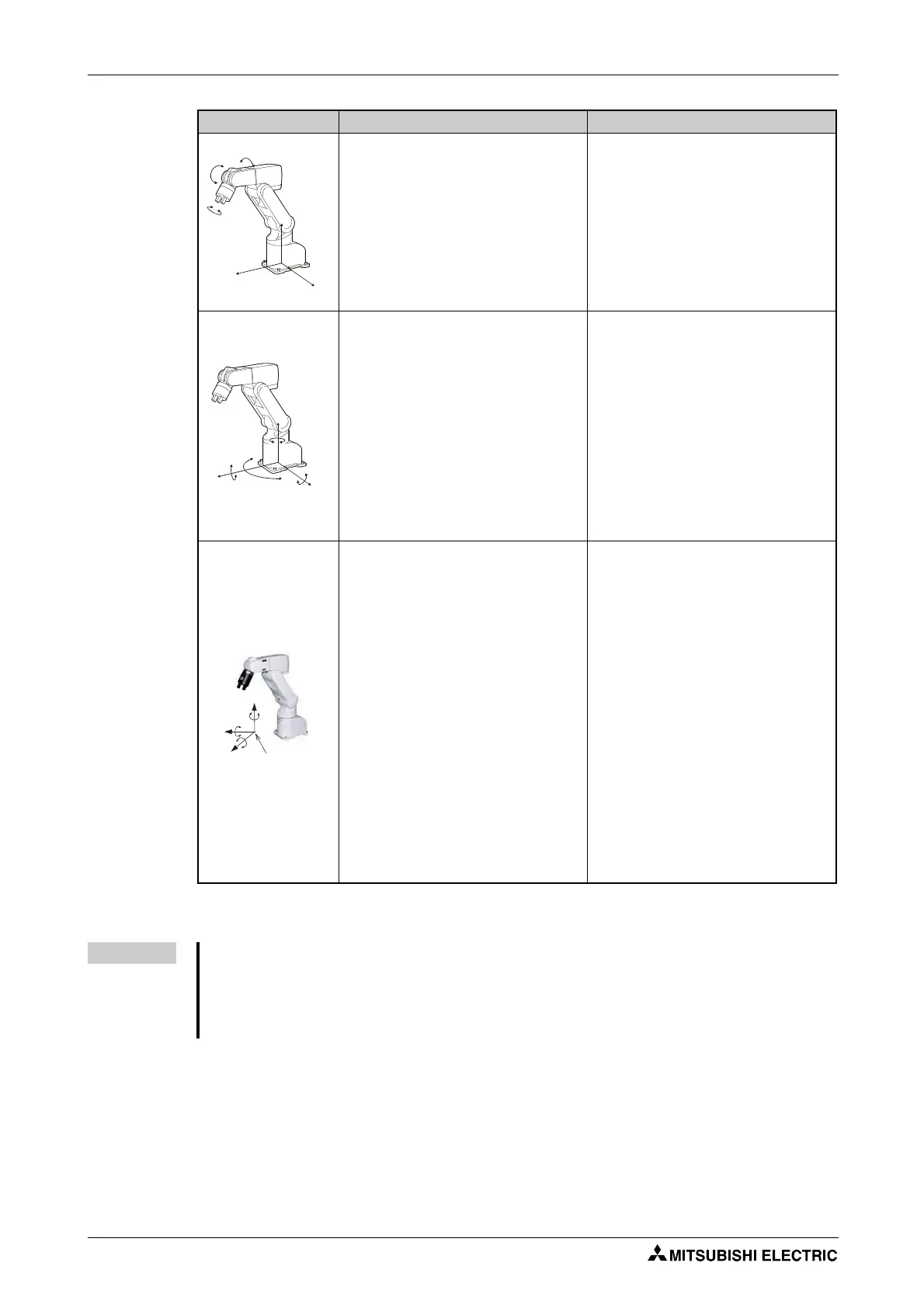
3-axis XYZ JOG mode
R000866C
Execute the three points listed above.
앫
Press the function key twice to switch to the
3-axis XYZ JOG mode.
The position of the tipped tool can be moved
along the axes in the XYZ coordinate system in
3-axis XYZ JOG mode.
In contrast to XYZ JOG mode, the position of
the robot is changed as in articulated joint
mode by rotating axes J4, J5 and J6. with a
fixed position of the tipped too, the position is
interpolated over axes X, Y, Z, J4, J5 and J6, i.e.
the position is not constant.
The middle point of the tool must be set by
parameter MEXTL.
Circle JOG mode
R000867C
Execute the three points listed above.
앫
Press the function key three times to switch
to the circle JOG mode.
The position of the tipped tool can be rotated
in circles around the zero point in circle JOG
mode.
A change in the X-axis coordinate moves the
tipped tool radially, starting from the middle
point of the robot. A change in the Y-axis coor-
dinate has the effect of the same movement
as control of the J1 axis in articulated joint JOG
mode. A change in the
Z-axis coordinate has the effect of a manual
movement in the Z direction as in XYZ JOG
mode.
If the coordinates of the A, B or C axis are
changed then the hand gripper is rotated as in
XYZ JOG mode. The axes of robot type RH can
be controlled.
Workpiece jog mode
R001546E
Execute the three points listed above.
앫
Press the function key three times to switch
to workpiece JOG mode.
앫
To move the axes, press appropriate key
X, Y, Z, A, B, C.
In workpiece jog mode, the position of the
tipped tool can be moved along the axles of
the workpiece coordinate system. Buttons A, B
and C rotate the position of the robot around
the X, Y and Z axles of the workpiece coor-
dinate system without changing the position
of the tipped tool. You must set the tool mid-
dle point with the MEXTL parameter.
NOTE:
Workpiece coordinate system:
You must set the workpiece coordinate sys-
tem before using JOG mode. (There are eight
parameters (WKnCORD, n = 1–8) for setting
the coordinate system.) If the workpiece coor-
dinate system is not defined, the robot will
move in XYZ JOG mode. For details please
consult the robot’s technical manual.
This function is available in the following soft-
ware versions:
TB: from version 1.3
SD series: from version P8
SQ series: from version N8
NOTE
If the monitoring point of the hand in tool JOG mode, XYZ JOG mode or circle JOG mode
approaches a singular point then a warning sign appears on the Teaching Box and a warning sig-
nal is issued. The function can be deactivated by parameter MESNGLSW. A detailed description of
the parameter and the function "Error message on reaching a singular point" is contained in the
operating and programming instructions.
Operating mode Mode Description
Tab. 6-1:
JOG modes (2)
+J4
+Y
+Y
+B
-B
+Y
 Loading...
Loading...


