Grounding the robot system Installation
3 - 28
3.6 Grounding the robot system
General instructions on grounding the robot system
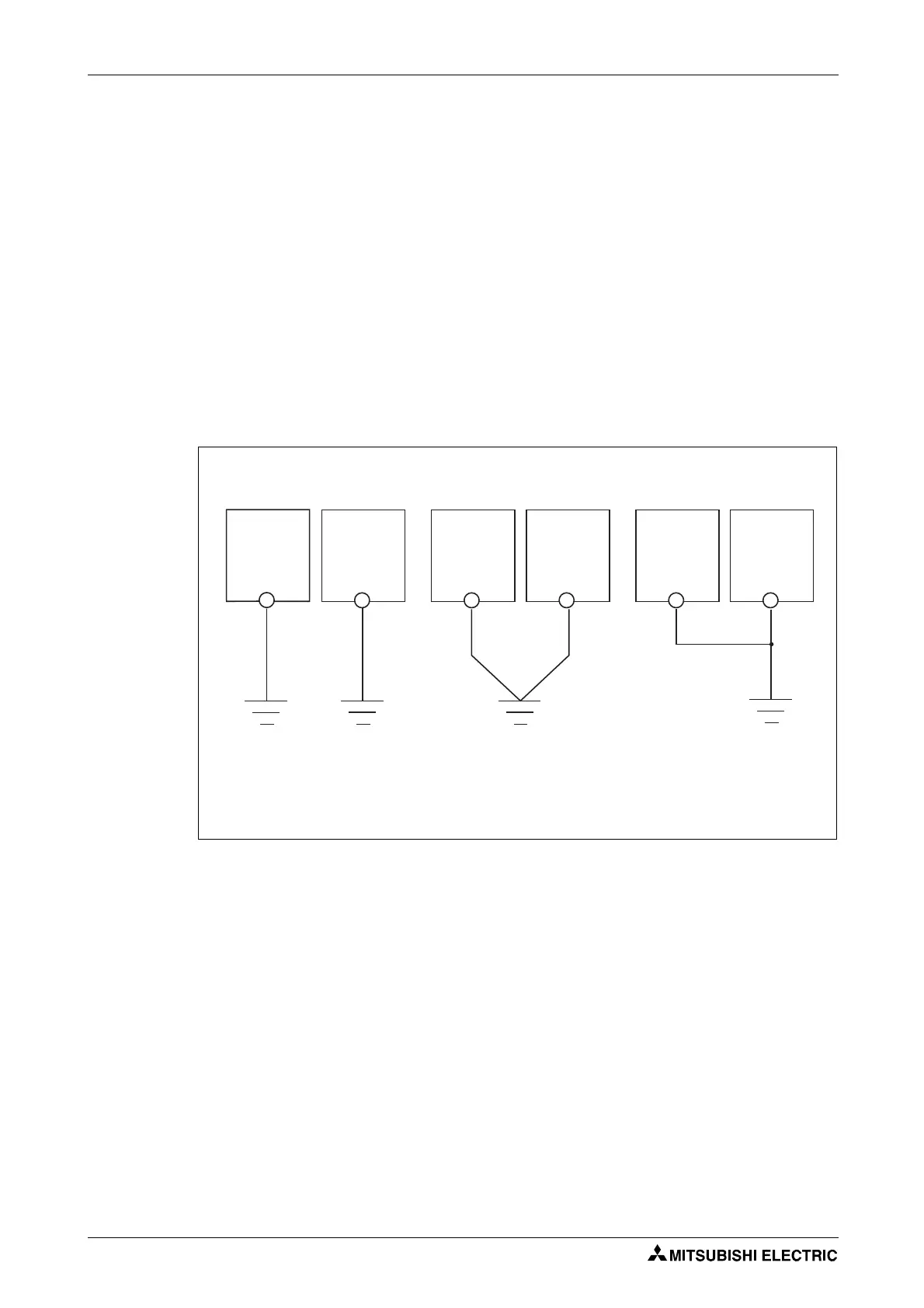
Three ways of grounding are shown in Fig. 3-23.
●
Separate grounding is the best solution.
– The robot arm is grounded at an M4 threaded hole (see Fig. 3-24) on the base area.
– The control unit is grounded together with the mains line (feed) connection.
To ground the control unit, proceed as described in Section 4.2.
●
If possible, the grounding of the robot arm must be separated from other units/devices.
●
The minimum cross-section of the grounding cable must be 2.0 mm² (RV-2SD/RV-2SQ) or 3.5 mm²
(all other models)
●
The grounding cable is not included in the scope of delivery of the robot system.
●
The grounding cable should be kept as short as possible.
R000451E
Fig. 3-23: Grounding the robot system
Robot arm
separate grounding
(best solution)
Control unit
and personal
computer
Robot arm Robot arm
Control unit
and personal
computer
Control unit
and personal
computer
parallel grounding
(good solution)
common grounding
(permissible)
 Loading...
Loading...


