System overview Teaching Box
SD-/SQ series 2 - 17
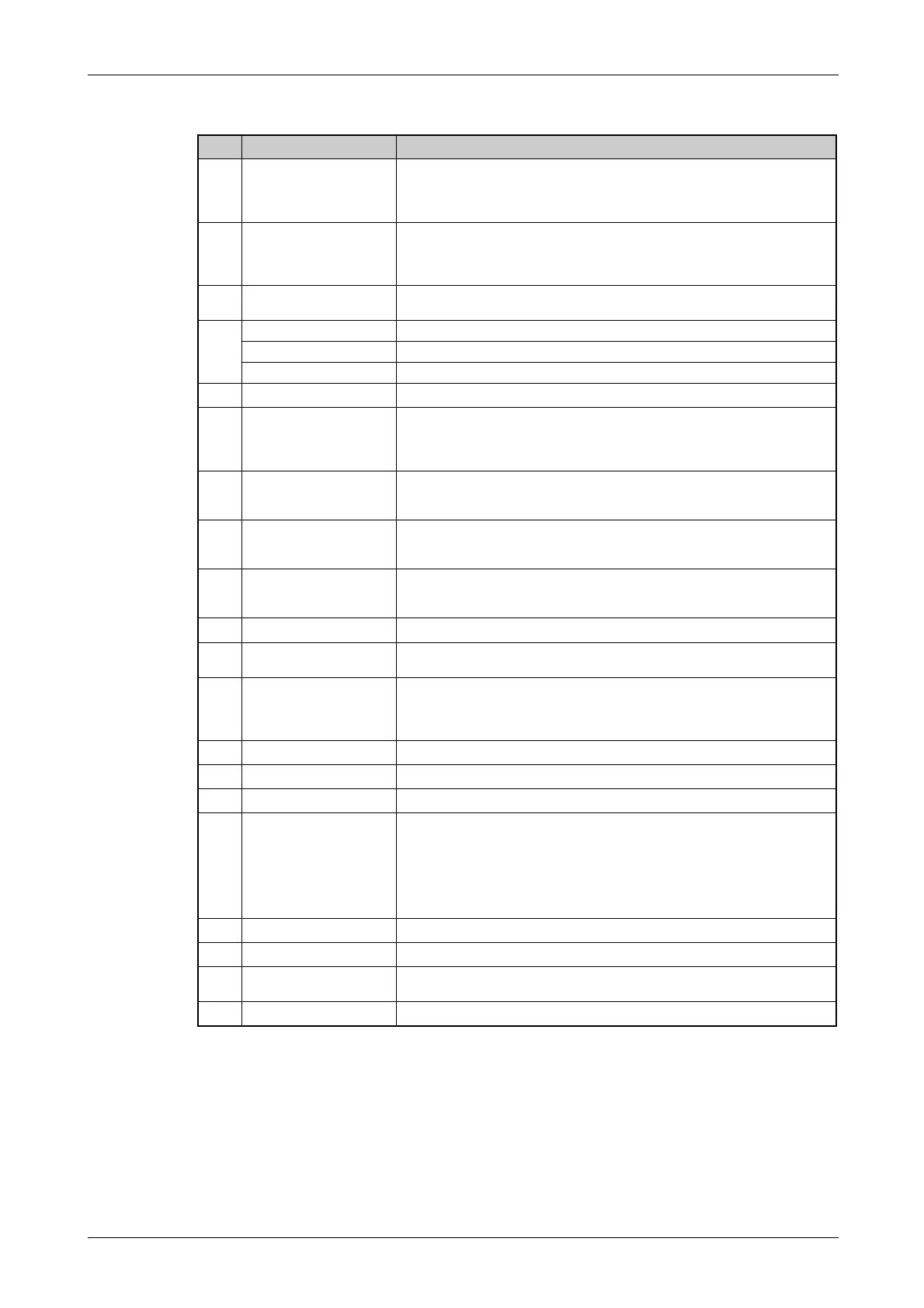
No. Name Function
[EMG.STOP] pushbutton
switch
EMERGENCY-STOP pushbutton with locking function
If you press the pushbutton then the robot arm stops instantaneously. The servo
power supply is switched off The pushbutton switch is unlocked by turning it
clockwise.
[ENABLE/DISABLE]
selector switch
Releases control over the Teaching Box
Put switch into "ENABLE" position to control the robot arm via the Teaching Box.
As long as the Teaching Box is enabled, the robot arm can neither be controlled
from the control panel of the control unit nor externally.
LCD display
The LCD display has 4 lines, each with 16 characters
The state of the program or of the robot arm is displayed here
[TOOL] key Select the tool-jog mode
[JOINT] key Select the articulated joint-jog mode
[XYZ] key Select the XYZ-jog- or circular-jog mode
[MENU] key Returns to the main menu
[STOP] key
Cancel the running program and stop the robot
This function is the same as the function of the [STOP] key on the control panel of
the control unit. This key function is always available, independent of the position of
the [ENABLE/DISABLE] selector switch.
[STEP/MOVE] key
Execute jog-mode together with jog keys and the 3-step enable switch
Instruction steps are executed together with the [INP/EXE] key.
The servo power supply is switched off
[+/FORWD] key
Forward steps are executed together with the [INP/EXE] key.
The next program line in edit mode is displayed. Press the key together with the
[STEP/MOVE] key to increase override.
[/BACKWD] key
Reverse steps are executed together with the [INP/EXE] key.
The previous program line in edit mode is displayed. Press the key together with the
[STEP/MOVE] key to decrease override.
[COND] key Edit the program
[ERROR RESET] key
Acknowledges an error code
A program is reset when used together with the [INP/EXE] key.
12 keys for JOG mode:
[X/(J1)]...[+C/(J6)]
Function key for jog mode
All articulated joints can be moved individually in articulated joint-jog mode. The
robot arm can be moved along any of the coordinate axes in XYZ jog mode. These
keys are also used to enter the menu selection numbers or step numbers.
[ADD/] key Enter positions or move cursor upwards
[RPL/] key Change positions or move cursor downwards
[DEL/] key Delete positions or move cursor to the left
[HAND/] key
Used together with keys [+C/(J6)] or [C/(J6)] to move the
first gripper hand
Used together with keys [+B/(J5)] or [B/(J5)] to move the
second gripper hand
Used together with keys [+A/(J4)] or [A/(J4)] to move the
third gripper hand
Move the cursor to the right
[INP/EXE] Enter data or move on a step
[POS/CHAR] key Switches between numbers and letters, e. g. when editing position data
Three-step switch
The three-step enable switch must be actuated to switch on the servo drive when
the Teaching Box is switched on.
Contrast adjustment Brightness setting on the LCD display
Tab. 2-8: Overview of Teaching Box R28TB controls
 Loading...
Loading...


