3. SLMP
3 - 4
3.3 Command
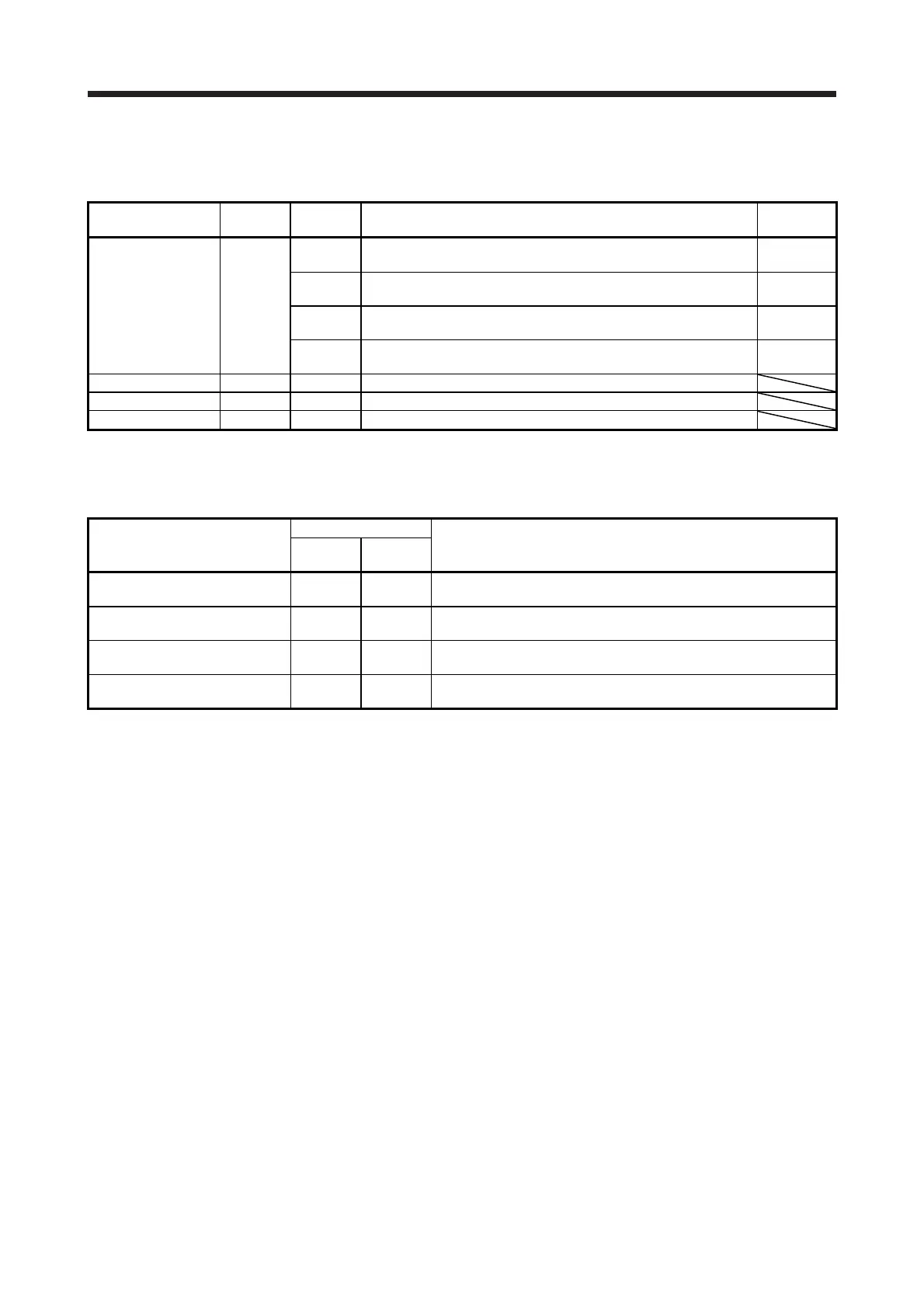
The following table lists applicable commands.
Name Command
Sub
command
Description
Detailed
explanation
CiA 402 object
read/write
4020h 0001h Reads data specified by using the CiA 402 object from the servo
amplifier to the external device.
Section
3.4.1
0002h Writes data specified by using the CiA 402 object from the external
device to the servo amplifier.
Section
3.4.2
0005h Reads data of consecutive sub commands specified by using the CiA
402 object from the servo amplifier to the external device.
Section
3.4.3
0006h Writes data of consecutive sub commands specified by using the CiA
402 object from the external device to the servo amplifier.
Section
3.4.4
NodeSearch 0E30h 0000h Detects the server device in the network.
IPAddressSet 0E31h 0000h Sets the IP address of the server device in the network.
Model code read 0101h 0000h Reads the servo amplifier model.
3.4 CiA 402 read/write command
The MR-JE-_C servo amplifier supports the CiA 402 read/write command.
Service
SLMP
Description
Command
Sub
command
SDO Upload 4020h 0001h Reads data specified by using the CiA 402 object from the servo
amplifier to the external device.
SDO Download 4020h 0002h Writes data specified by using the CiA 402 object from the external
device to the servo amplifier.
SDO Object SubID Block Upload 4020h 0005h Reads data of consecutive sub commands specified by using the CiA
402 object from the servo amplifier to the external device.
SDO Object SubID Block
Download
4020h 0006h Writes data of consecutive sub commands specified by using the CiA
402 object from the external device to the servo amplifier.

 Loading...
Loading...

