7. OBJECT LIBRARY
7 - 41
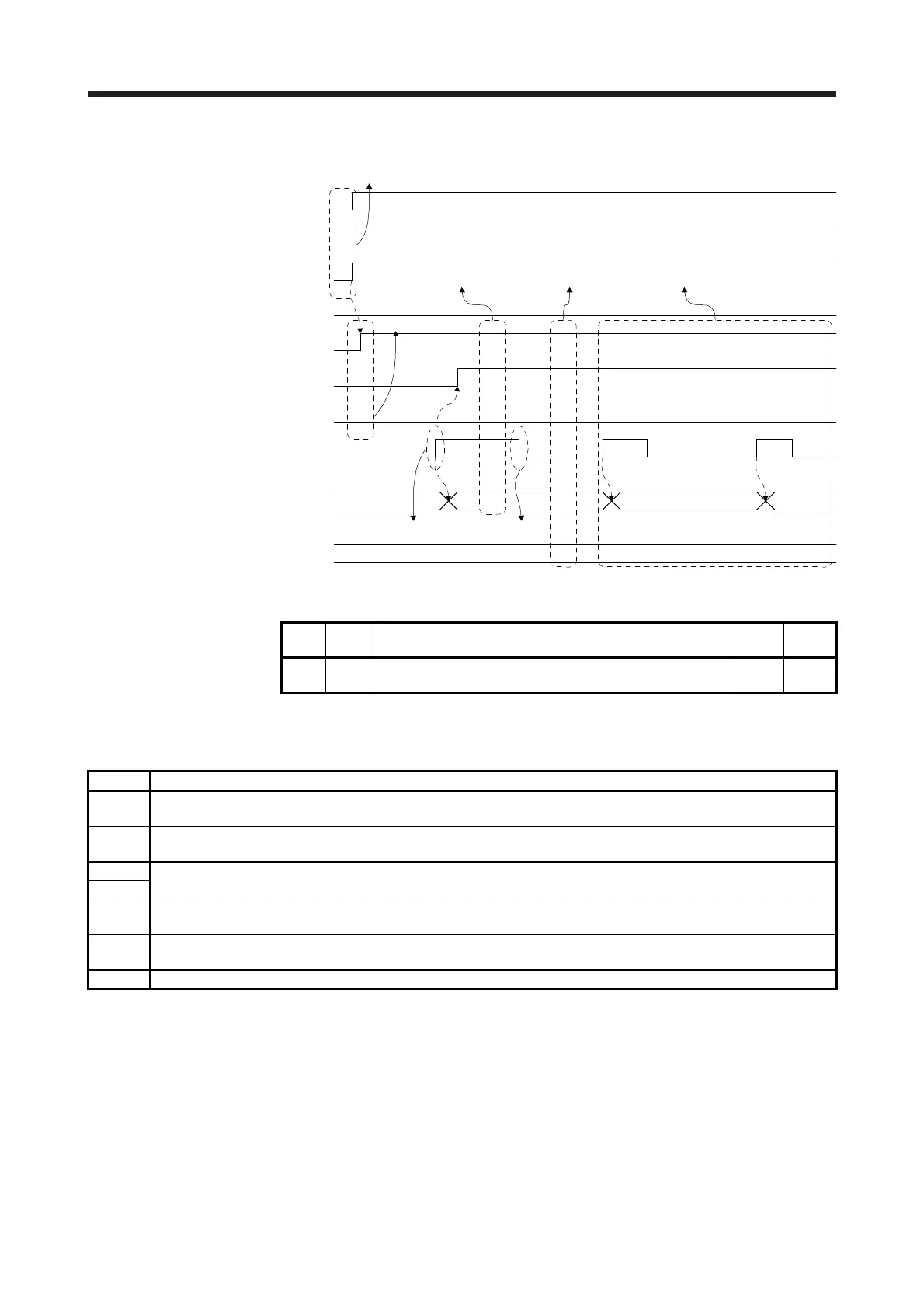
The following shows a timing chart.
60B8h Bit 0
1
0
(a) 60B8h = 0013h
(d) 60B9h = 0003h
(b) 60B9h = 0001h
(c) TPR1 on (e) TPR1 off
(f) 60B9h = 0003h (g) Latches continuously
1
0
1
0
A0
0
BC
1
0
1
0
1
0
1
0
ON
OFF
60B8h Bit 1
60B8h Bit 4
60B8h Bit 5
60B9h Bit 0
60B9h Bit 1
60B9h Bit 2
TPR1 (Touch Probe 1)
(Touch probe signal)
60BAh
60BBh
7.4.9 Touch probe function setting (60B8h)
Index
Sub
Index
Name
Data
type
Read/
write
60B8h 0 Touch probe function setting (Touch probe function) 2 bytes
Read/
write
The current setting of the touch probe function can be checked.
Each setting of the touch probe function can also be set. The settings of this object are as follows.
Bit Description
0
0: Latch function disabled
1: Latch function enabled
1
0: Latch with the first trigger
1: Continuously latch with trigger inputs
2 The value at reading is undefined. Set "0" when writing.
3
4
0: Stop sampling at the rising edge of touch probe
1: Start sampling at the rising edge of touch probe
5
0: Stop sampling at the falling edge of touch probe
1: Start sampling at the falling edge of touch probe
6 to 15 The value at reading is undefined. Set "0" when writing.
Select enable/disable for the latch function with bit 0. Select "1" when using the touch probe function.
Select a trigger condition for the touch probe function with bit 1. Set "0" to latch just once when TPR1 (Touch
probe 1) is inputted. Set "1" to latch every time TPR1 (Touch probe 1) is inputted.
Set a condition for the rising edge of TPR1 (Touch probe 1) with bit 4. Set "1" to latch at the rising edge.
Set a condition for the falling edge of TPR1 (Touch probe 1) with bit 5. Set "1" to latch at the falling edge.

 Loading...
Loading...

