7. OBJECT LIBRARY
7 - 40
7.4.8 Touch probe (60B8h to 60BBh)
The current position latch data at the time of TPR1 (Touch probe 1) input can be read.
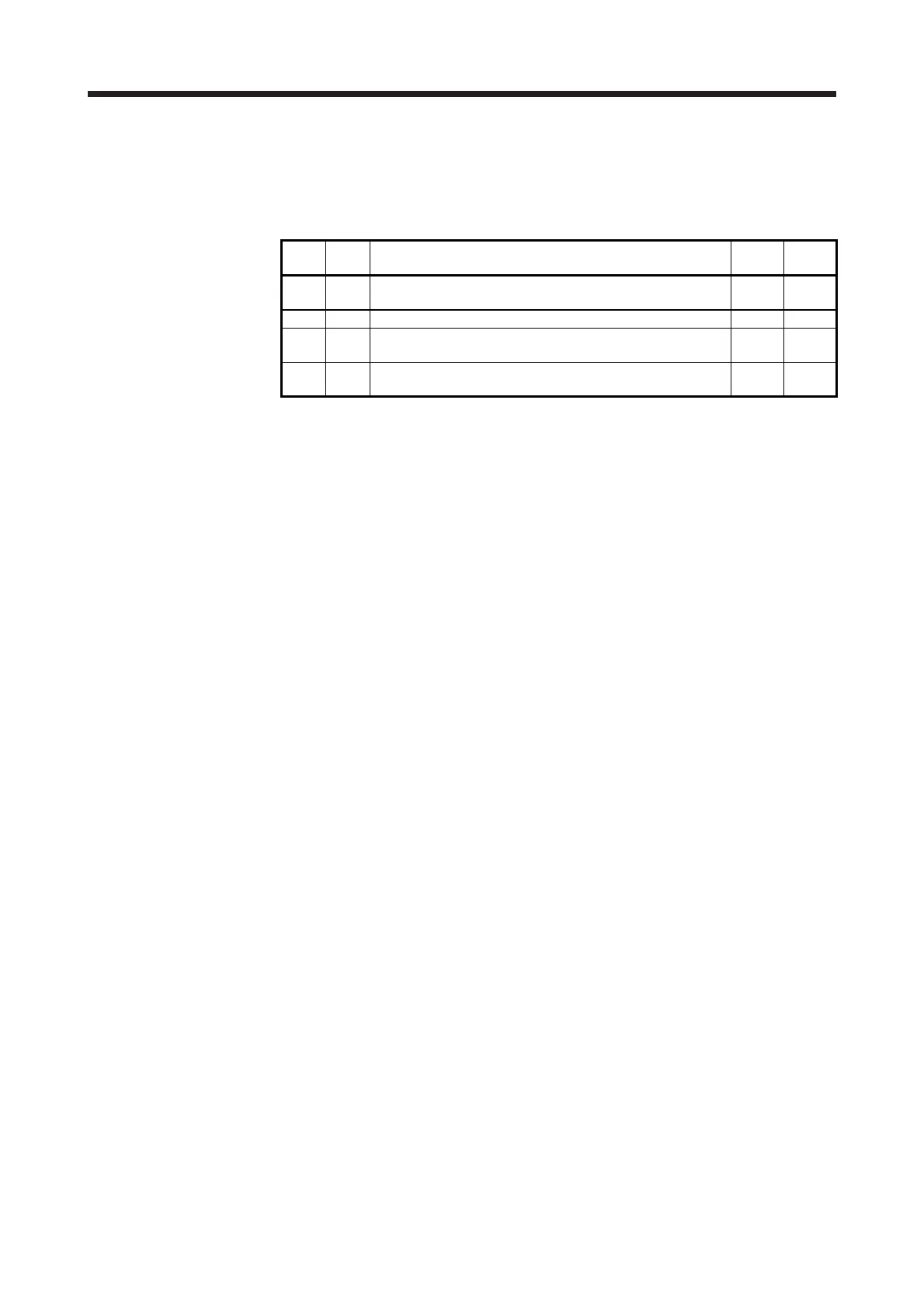
(1) Object list
Index
Sub
Index
Name
Data
type
Read/
write
60B8h 0 Touch probe function setting (Touch probe function) 2 bytes
Read/
write
60B9h 0 Status of the touch probe function (Touch probe status) 2 bytes Reading
60BAh 0
Rising edge position of touch probe (Touch probe position
positive value)
4 bytes Reading
60BBh 0
Falling edge position of touch probe (Touch probe position
negative value)
4 bytes Reading
When the touch probe function (60B8h) is set, and TPR1 (touch probe1), an external signal, is turned
on/off, the current position of the rising and falling edges are latched.
The latch status of the current position data can be checked with the touch probe status (60B9h). The
latched current data can be read with the touch probe position positive value (60BAh) and the touch
probe position negative value (60BBh). For details of each object, refer to sections 7.4.9 to 7.4.12.
(2) Usage
The following explains for latching the current position at the rising edge of TPR1 (Touch probe 1).
(a) Set "0013h" to the touch probe function setting (Touch probe function: 60B8h) to store data at rising
edge of TPR1 (Touch probe 1).
(b) At this time, the touch probe status (Touch probe status: 60B9h) is set to "0001h", and the latched
data has not been stored yet.
(c) Use an external signal to turn on TPR1 (Touch probe 1).
(d) The touch probe status (Touch probe status: 60B9h) changes to "0003h", and the current position at
the time of TPR1 (touch probe1) on will be stored to the rising edge position of touch probe (Touch
probe position positive value: 60BAh).
(e) Use an external signal to turn off TPR1 (Touch probe 1).
(f) The touch probe status (Touch probe status: 60B9h) remains "0003h", and the current position at
the time that TPR1 (Touch probe 1) turns off will not be stored as the touch probe falling edge
position (Touch probe position negative value: 60BBh).
(g) Latching can be continued from (c).

 Loading...
Loading...

