6. MANUFACTURER FUNCTIONS
6 - 4
6.3 Machine diagnosis function
This function estimates the friction and vibrational component of the drive system in the equipment based on
the data in the servo amplifier, and recognizes an error in the machine parts, including a ball screw and
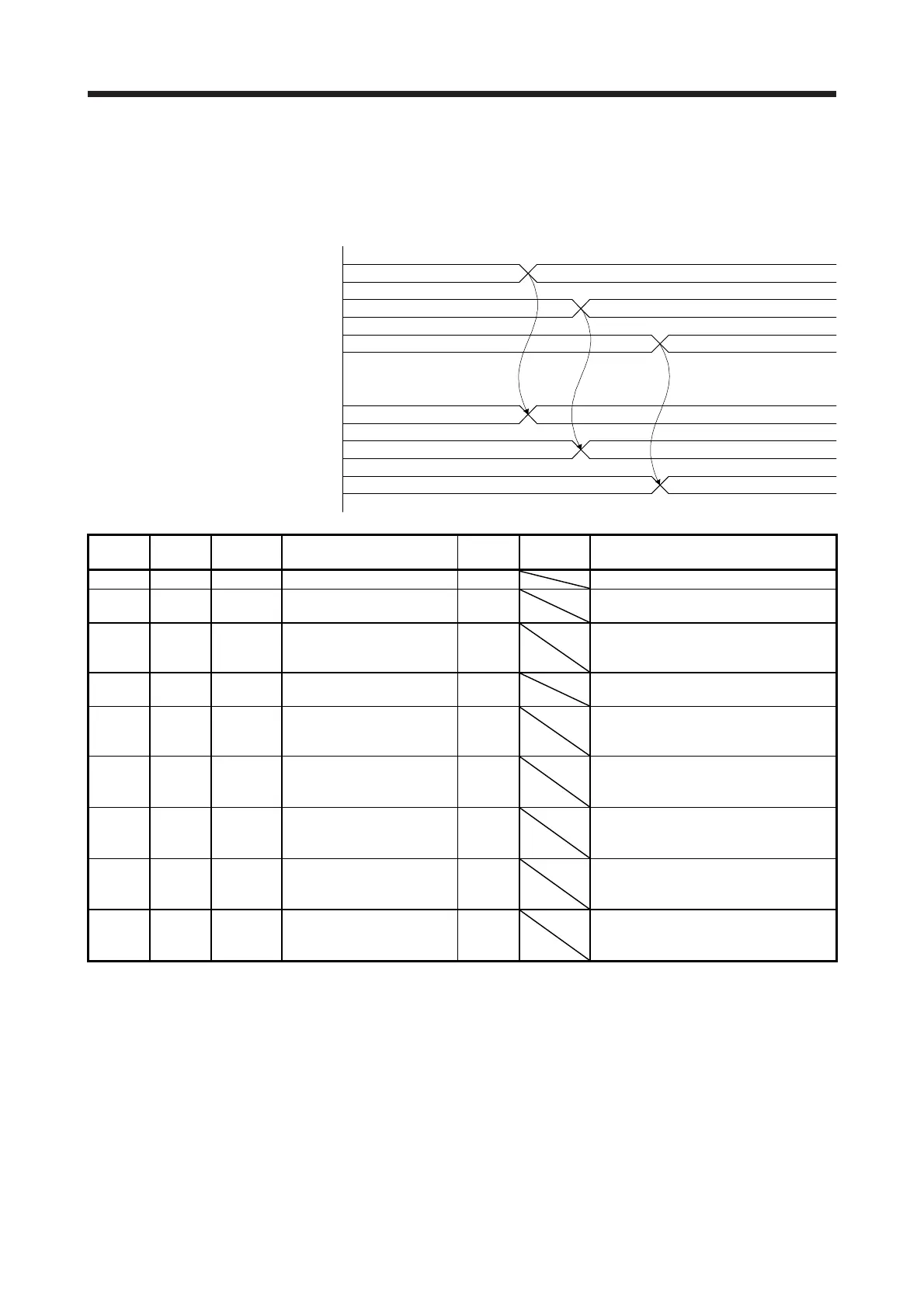
bearing. The information of the machine diagnosis function can be obtained with the following objects.
During estimation
C20h
C21h/2C22h
C23h/2C24h
C25h to 2C28h
Bit 0 to Bit 3
Friction estimation status at forward rotation
Bit 4 to Bit 7
Friction estimation status at reverse rotation
Bit 8 to Bit 11
Vibration estimation status
Estimation completed
Estimation completed
During estimation Estimation completed
During estimation
Undefined value Estimated value
Undefined value Estimated value
Undefined value Estimated value
Index
Sub-
address
Read/write Name
Data
type
Initial
value
Description
2C20h 0 Reading Machine diagnostic status 2 bytes Refer to section 7.1.
2C21h 0 Reading
Static friction torque at
forward rotation
2 bytes
Static friction at forward rotation torque is
displayed in increments of 0.1%.
2C22h 0 Reading
Dynamic friction torque at
forward rotation (at rated
speed)
2 bytes
Kinetic friction at forward rotation torque at
the rated speed is displayed in increments
of 0.1%.
2C23h 0 Reading
Static friction torque at
reverse rotation
2 bytes
Static friction at reverse rotation torque is
displayed in increments of 0.1%.
2C24h 0 Reading
Dynamic friction torque at
reverse rotation (at rated
speed)
2 bytes
Kinetic friction at reverse rotation torque at
the rated speed is displayed in increments
of 0.1%.
2C25h 0 Reading
Oscillation frequency during
motor stop
2 bytes
Vibration frequency at stop/servo-lock
Vibration frequency during stop/servo-lock
is displayed in increments of 1 Hz.
2C26h 0 Reading
Vibration level during motor
stop
2 bytes
Vibration level at stop/servo-lock
Vibration level during stop/servo-lock is
displayed in increments of 0.1%.
2C27h 0 Reading
Oscillation frequency during
motor operating
2 bytes
Vibration frequency during operation
Vibration frequency during operation is
displayed in increments of 1 Hz.
2C28h 0 Reading
Vibration level during motor
operating
2 bytes
Vibration level during operation
Vibration level during operation is
displayed in increments of 0.1%.

 Loading...
Loading...

