6Safety
Safety 6-115
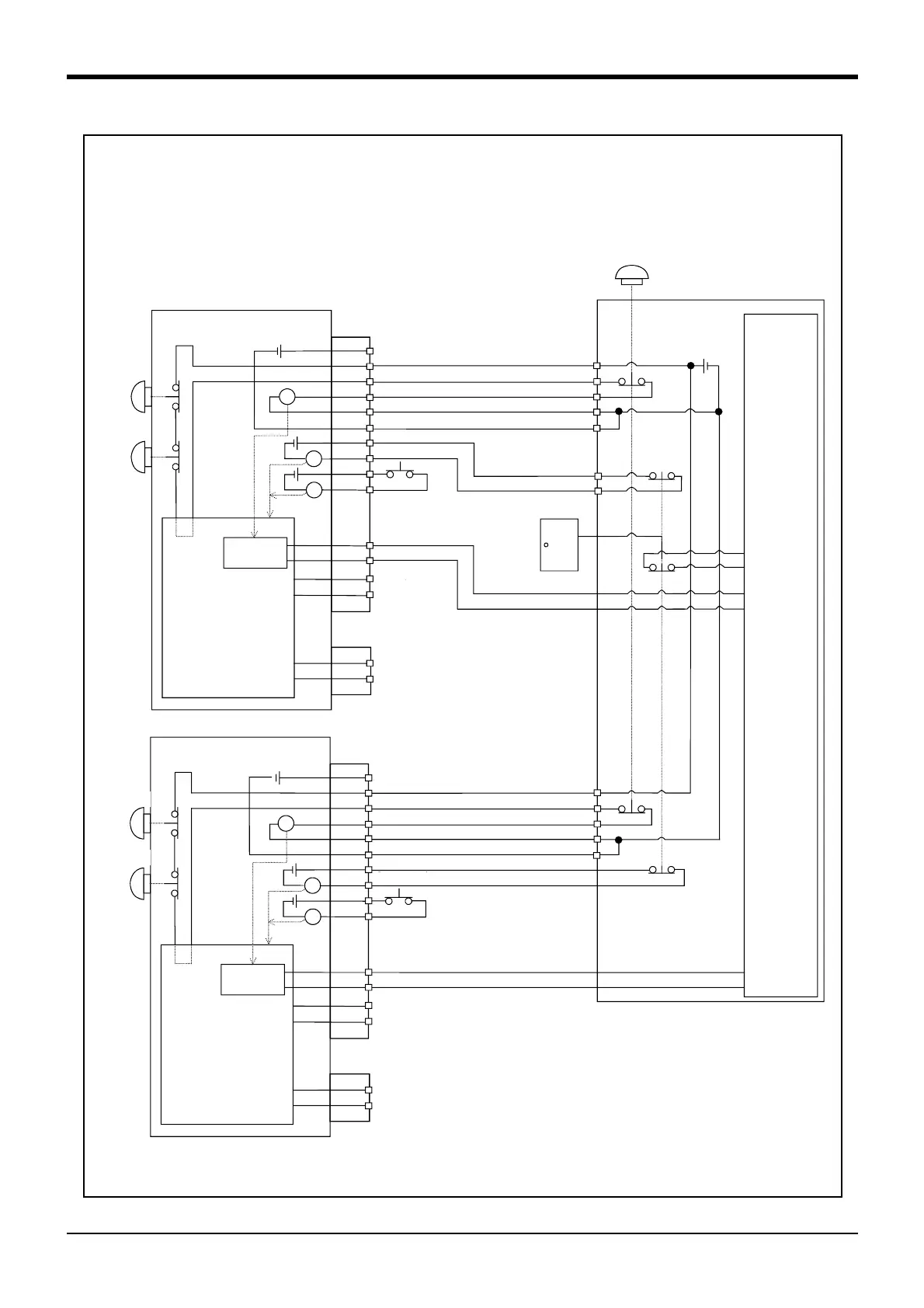
Fig.6-4 : Example of safety measures (CR750 wiring example 4)
OP非常停止
ボタン
TB非常停止
ボタン
周辺装置
の非常停止
出力
周辺装置内部
非常停止回路
周辺装置
非常停止スイッチ
(4接点タイプ)
安全柵のドア
ドアスイッチ出力
監視
周辺装置
の非常停止
出力
周辺装置側
電源24V
CNUSR2
内部非常停止回路
未接続
非常停止出力
モード出力
RA
RA
RA
}
ドアスイッチ入力
16/17
41/42
エラー出力
}
監視
監視
CNUSR2
内部非常停止回路
未接続
非常停止出力
モード出力
RA
RA
RA
}
ドアスイッチ入力
16/17
41/42
エラー出力
}
1
CNUSR11/CNUSR12
2
3
4
5
6
7
8
9
10
13
14
11
12
1
CNUSR11/CNUSR12
2
3
4
5
6
7
8
9
10
13
14
11
12
OP非常停止
ボタン
TB非常停止
ボタン
イネーブリング
デバイス
イネーブリング
デバイス
内部電源 24V
内部電源 24V
安全リレー
安全リレー
Controller #1
*5) Refer to Standard specification manual for the enabling device.
*6) The emergency stop button of the robot controller. (Only specification with the operation panel.)
*7) The emergency stop input detection relay uses the controller’s internal safety relay control. If the emergency stop input detection
relay is switched OFF, emergency stop is detected and the safety relay is also switched OFF.
Power supply in the robot
controller 24V
OP
Emer
-
gency stop
button
TB
Emer
-
gency stop
button
Not connected
Enabling
device
Mode output
Error output
Emergency stop output
Safety relay
Internal emergency
stop circuit
Emergency stop switch
(2- contact type)
Peripheral equipment
Safety fence
door
Power supply
24V
*1)
*2)
*3)
*6)
*4)
*5)
*7)
Monitor
Monitor
Circuit
Door switch input
Not connected
<Wiring example 4>: Connect the emergency stop switch of peripheral equipment, and the door switch to two controllers, and it
interlocks. Connect the enabling device to the robot controller.The power supply for emergency stop input
uses the power supply of peripheral equipment. Monitor the emergency stop state by the peripheral
equipment side.
<Operation of the emergency stop>
If the emergency stop switch of peripheral equipment is pushed, the robot will also be in the emergency
stop state. And, if the emergency stop switch of OP or T/B is pushed in the state of the power of con
-
troller OFF, peripheral equipment state can be the emergency stop also.
Monitor
Door switch input
Enabling
device
Emergency stop output
Power supply in the robot
controller 24V
Safety relay
TB
Emer
-
gency stop
button
*3)
OP
Emer
-
gency stop
button
*6)
Controller #2
*1) Each of the connectors, CNUSR11 and CNUSR12, are assigned with
the same pin number, creating 2 systems in each terminal. It is
absolutely necessary to connect the 2 systems.
*2) You can see in the diagram that connector CNUSR2 has 2 terminals
and 2 systems (16/17 indicates 2 terminals at pin number 16 and
pin number 17). It is absolutely necessary to connect the 2
systems.
*3) The T/B emergency stop button connected with the controller.
*4) Emergency stop input relay.
Mode output
Error output
Internal emergency
stop circuit
*1)
*2)
*7)
*4)
*5)
 Loading...
Loading...




