11
Rev. 1.1
0004102014
400-820-9661
SS03/05/10-S/Q/C Hardware Manual
56)RXUZLUH&RQ¿JXUDWLRQ
RS-485 four-wire system utilize separate transmit and receive wires. One pair of wires connect
the host’s transmit signals(TX+/TX-) to each drive’s RX+/RX- receive terminals. The other pair
connects the drive’s TX+/TX- terminals to the host’s receive signals. A logical ground terminal is
provided on each drive and can be used to keep all the drives at the same ground potential. The
¿UVWGULYH¶VORJLFDO*1'RIWKH56EXVPXVWFRQQHFWWRKRVW¶VJURXQG
Four-wire Connection
Connect the drive’s RX+ to the TX+ terminal of the host controller,and connect the drive’s RX- to
the TX- terminal of the host controller .
Connect the drive’s TX+ to the RX+ terminal of the host controller,and connect the drive’s TX- to
the RX- terminal of the host controller .
Connect the drive’s GND and the host’s GND to a same ground.
567RZZLUH&RQ¿JXUDWLRQ
In a two-wire system ,the data transmitting and receiving use a same cable.,the host must stop
its transmitting before receiving data. That means the host must stop transmit data before drive
begins to answer a query which just come from the host, otherwise the host cannot receive
any data witch sent from a drive. There is a transmit delay parameter that can be adjusted to
compensate for a host that is slow to disable its transmitter. This adjustment can be set over the
network using the TD command,it also can be set by using the Step-Servo Quick Tuner software.
Users can set a shorter transmit delay in a four-wire system.
Two-wire connection
The RX+ and TX+ of the drive connect to the host’s D+ in parallel.
The RX- and TX- of the drive connect to the host’s D- in parallel.
Connect the drive’s GND and the host’s GND to a same ground.
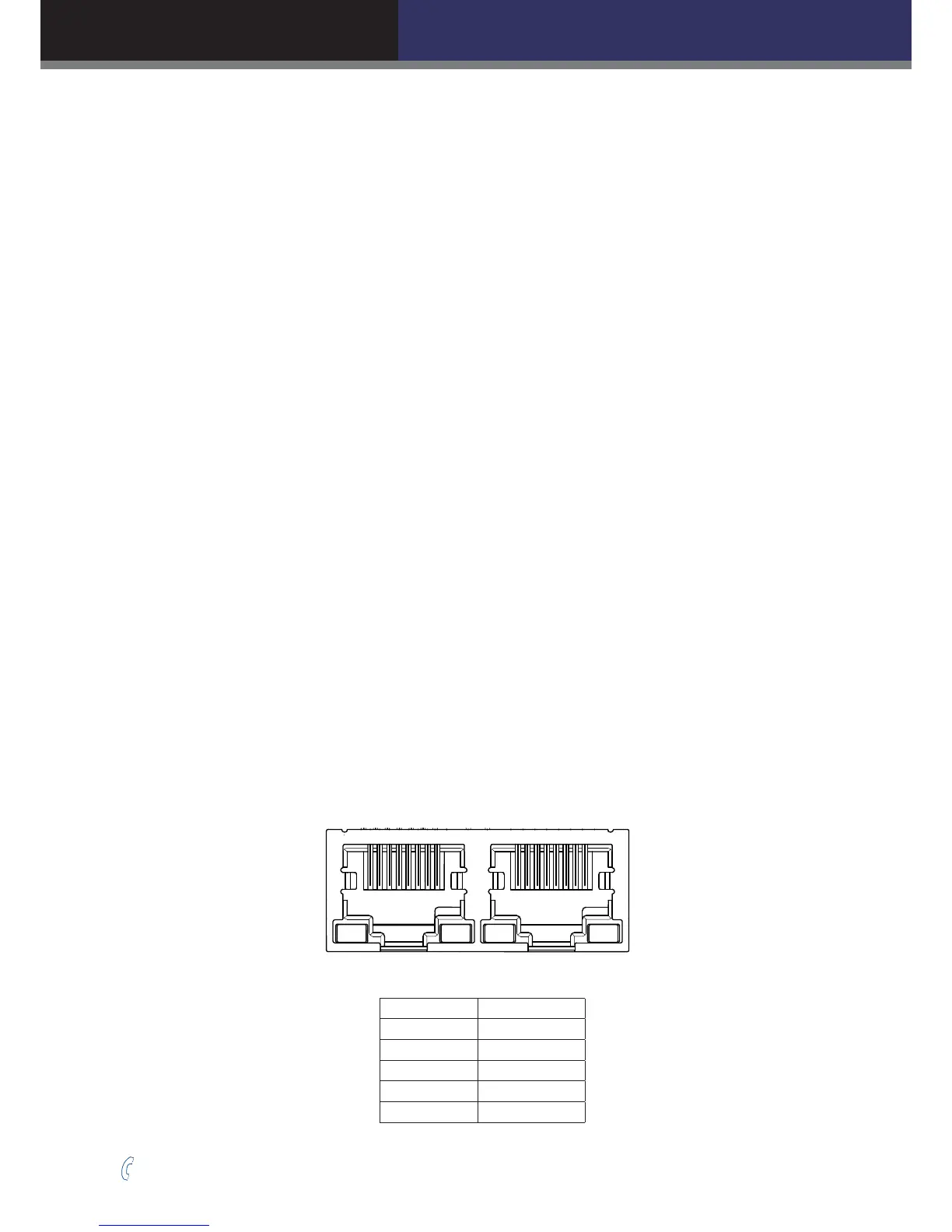
2.4 Connecting to a host using CANopen
The CANopen version SS drives can be daisy-chain connected through the dual-port RJ45
connectors at the side of the drive, using CAT5 cable.
PIN1 PIN1 PIN8PIN8
RJ45 Connector Diagram:
PIN Function
1CAN_H
2CAN_L
3
,7
GND
6 CHGND
4
,5,8
NC