Digitax SF Instruction Manual
Operation
6
6. Operation
5. Position Control Mode
5. Position Control Mode
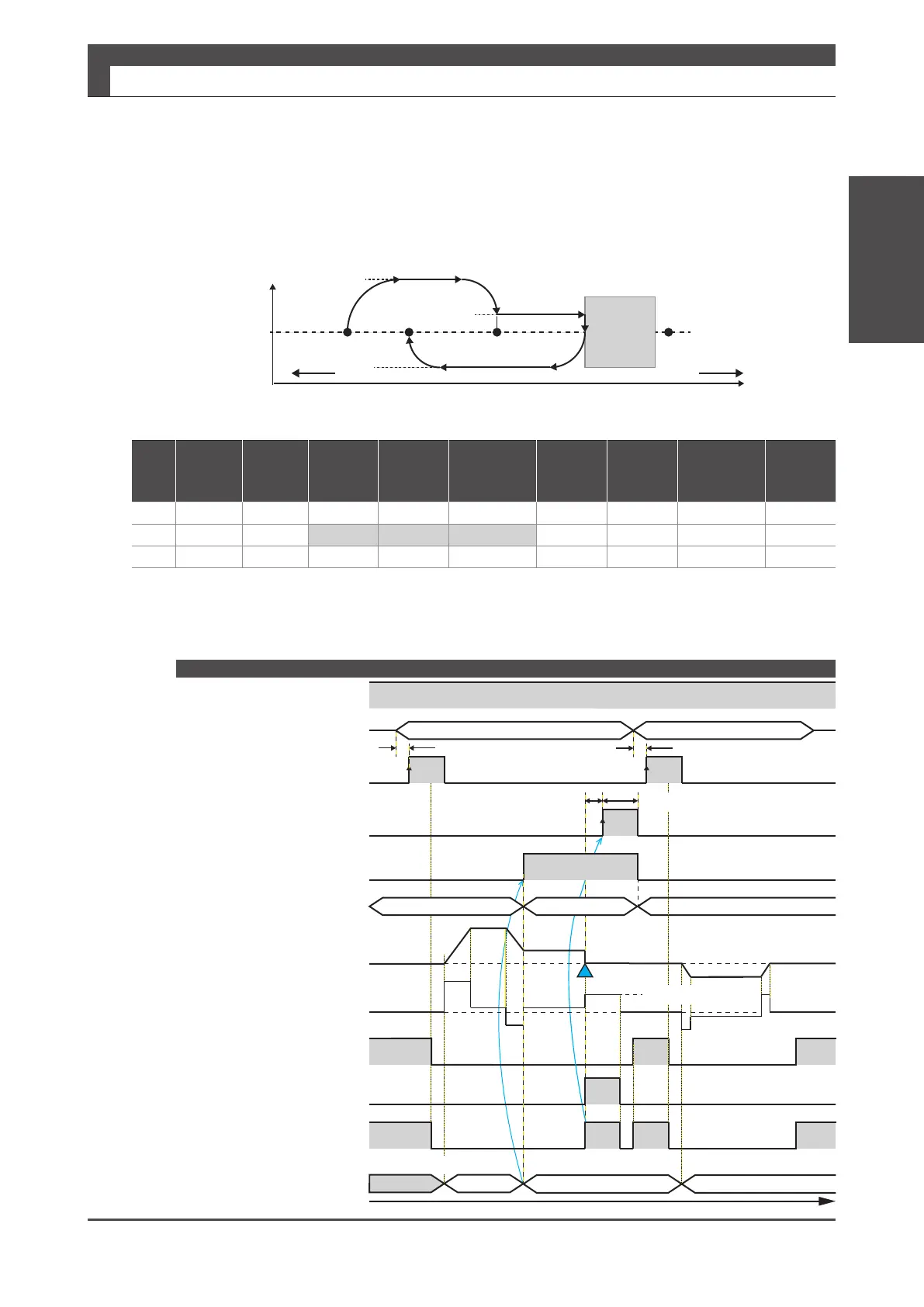
Position
Speed
CCWCW
0
Origin
P1
P3
P2
A1
D1
A3
D3
Workpiece
V1
V2
V3
Acceleration
Deceleration
Position
No. Position Rotational
Speed
[rpm]
Acceleration
Time
[ms]
Deceleration
Time
[ms]
Dwell Time
[ms]
Command
Method
Running
Motion
Positioning
Complete
[pulse]
Enable/
Disable
ON
OFF
OFF
ON
ON
ON
ON
−
Input
PCSEL1…4
Input
(
Internal
)
(MEND)
PCSTART1
OFF OFF
0[rpm]
ON
ON
OFF
ON
(Output)
PM1…3
Input
SVON
0
1
10msec(min.)
1
3
Input
RESET/
PCLR
Input
TLSEL1
ON
−
(Internal)
TorqueLimitvalue2
TorqueLimitvalue1 TorqueLimitvalue1
ON
ON
(
Internal
)
(T-LIMIT)
Output
MEND/
T-LIMIT
ON
OFF
OFF
OFF
0%
10msec(min.)
(Presswaitingtime)
3
ON
Workpiece
OF
FF
OFFOFF
OFF
OFF
2
SignalNameDescription
Chart
State
ofServo
Select
PointNo.
Start
Motor
Rotational
Speed
ResetAlarm/
ClearPosition
Error Counter
TorqueLimit
value
PointNo.
Torque
Command
Value
Motion
Complete
Limiting
thetorque
MotionComplete/
LimitingTorque
TorqueLimit
25msec(min.)
TorqueLimitvalue2
ParameterNo.
644.0=2