OMNI 4000/7000 Operations and Maintenance Guide – Rev F
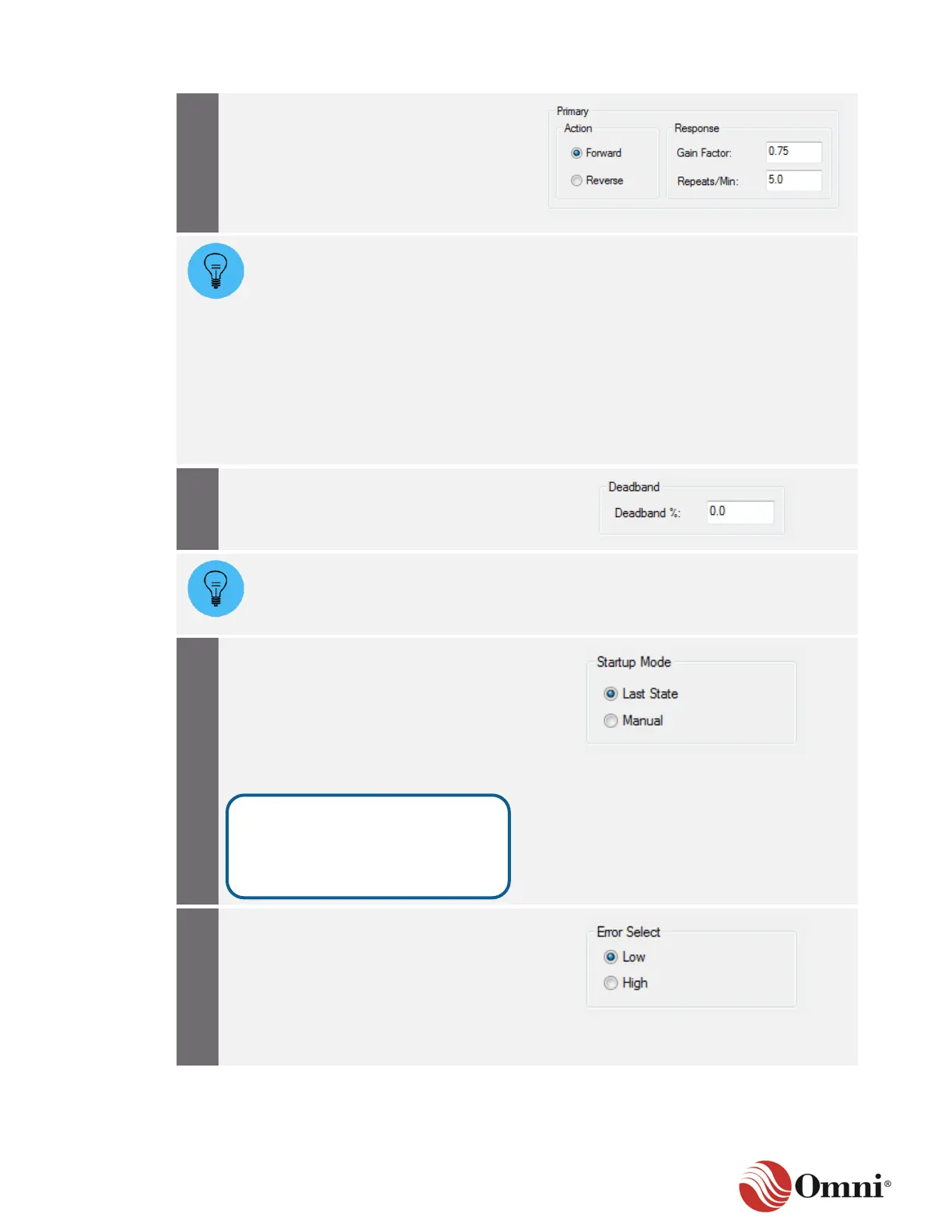
In the Response group, enter the Gain
Factor and Repeats/Min values for the
primary control variable.
a. Enter a Gain Factor number between
0.01 and 99.99.
b. Enter a Repeats/Min value between
0.0 and 40.00.
The Primary Gain Factor setting determines how responsive the control will be to
changes or upsets to the primary variable. The higher the entry, the more
responsive the control, but a value that is too high will cause instability and
oscillations to occur. If the setting is too low, the system will be slow to respond and
unable to adapt to changing conditions. For flow control, an initial value of 0.75
is reasonable.
The Repeats per Minute entry determines the integral action of the controller.
Integral action gradually integrates the error between the measurement and the
setpoint, adjusting the error to zero. The larger this entry is, the faster the output will
respond. If this entry is set too high, the system will be too responsive, and the
controller will overshoot the setpoint, causing instability and oscillations. An initial
value of 5 is a reasonable starting point for both primary and secondary entries.
Enter a Deadband % number.
PID Deadband is used to minimize wear and tear on the control valve actuator in
cases where the controlled variable is continuously changing. The control output of
the flow computer will not change as long as the calculated PID error percentage is
less than or equal to the entered Deadband percentage.
Select the Startup Mode:
a. Choose Last State to keep the PID
loop in the operating mode it was in
before a system reset occurs.
b. Choose Manual to start up in the
Manual Mode with the control output
percentage frozen to the value it was
before the system reset.
Select the Error Select parameter:
a. Choose Low to instruct the flow
computer to control which variable
(primary or secondary) has the
“lowest calculated error percentage.”
b. Choose High to control which variable
has the “highest calculated error
percentage.”
This entry determines how the PID
control will resume after a system
reset or power-up (such as a
momentary power loss).
 Loading...
Loading...