Precautions for Correct Use
If you are using the measurement results of the Sensor Controller to operate an external de-
vice, make sure the movement is within the range of the movement of the external device be-
fore you implement the move.
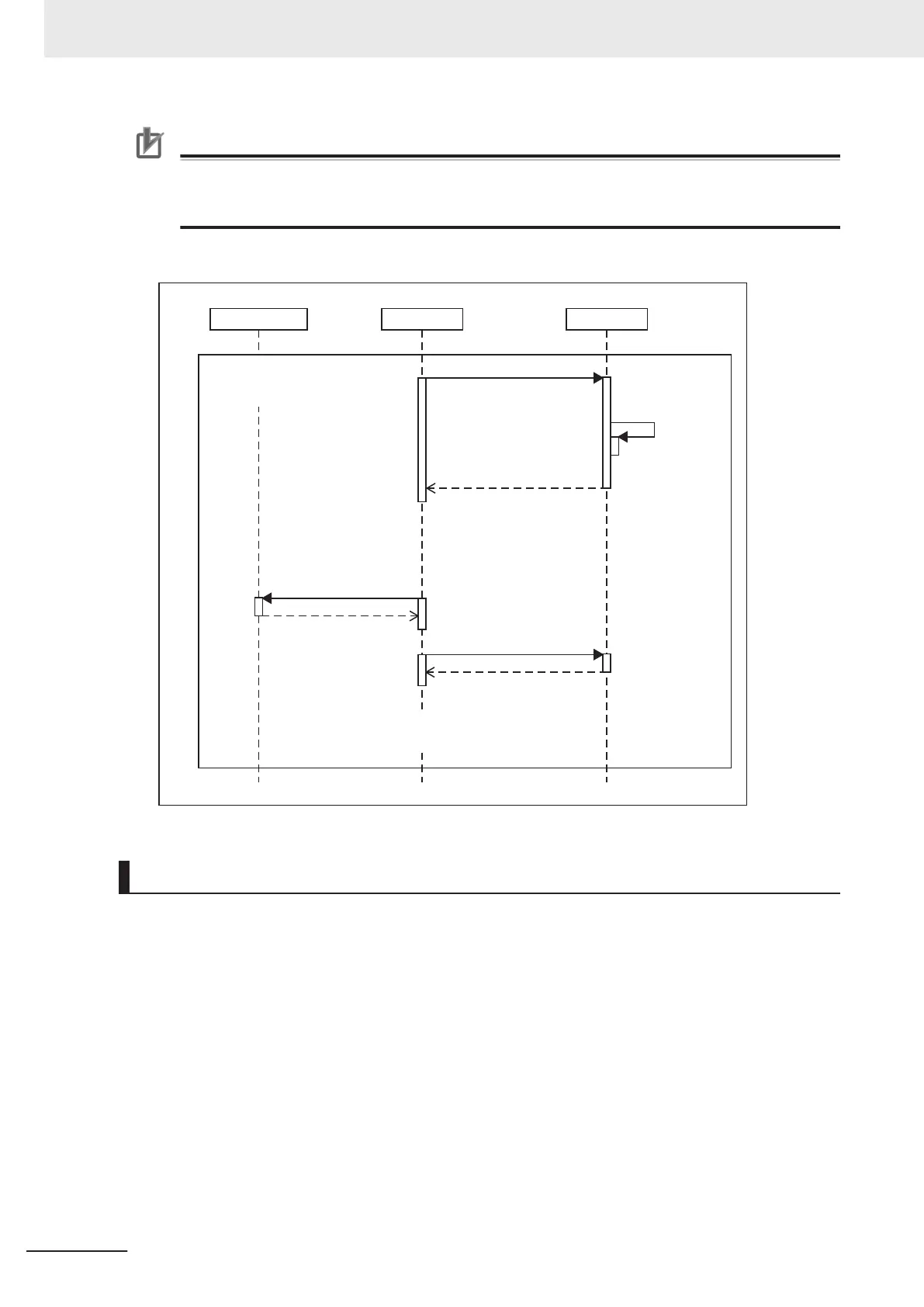
Executing Alignment:
External device
PLC
FH/FHV
1: Measurement request
1.1: Measurement
processing
Data output
Move completion response
3: Set the current axis position
Setting completion response
If the position difference is greater
than the threshold, the processing in
the frame is repeated.
2: Move each axes by the
amount of the axis
movement.
Processing exits the loop if the
position difference is less than or
equal to the threshold.
• Axis movement (for the
number of axes on the
external device)
• Position XY differences
• Angular position difference
Other Alignment Functions
l
When failed to measure such as an alignment mark, an operator directly
and manually specifies the coordinates [Manual Position Setting]
When failed to measure such as an alignment mark, an operator can specify the coordinates man-
ually and directly by using the Manual Position Setting processing unit function in combination with
a processing unit such as Search to detect an alignment mark.
There are two ways to launch the Manual Position Setting function.
• Communication command startup:
Higher-level devices such as PLC check a transmitted measurement data from the Sensor con-
troller. If the Position Setting Request flag was set, then the device judge the measurement failed
and send a measurement command for re-measurement. The command opens the Manual
Position Setting screen.
• Auto startup during measurement:
10 Advanced Usage
10 - 64
FH/FHV Series Vision System User’s Manual (Z365-E1)

 Loading...
Loading...














