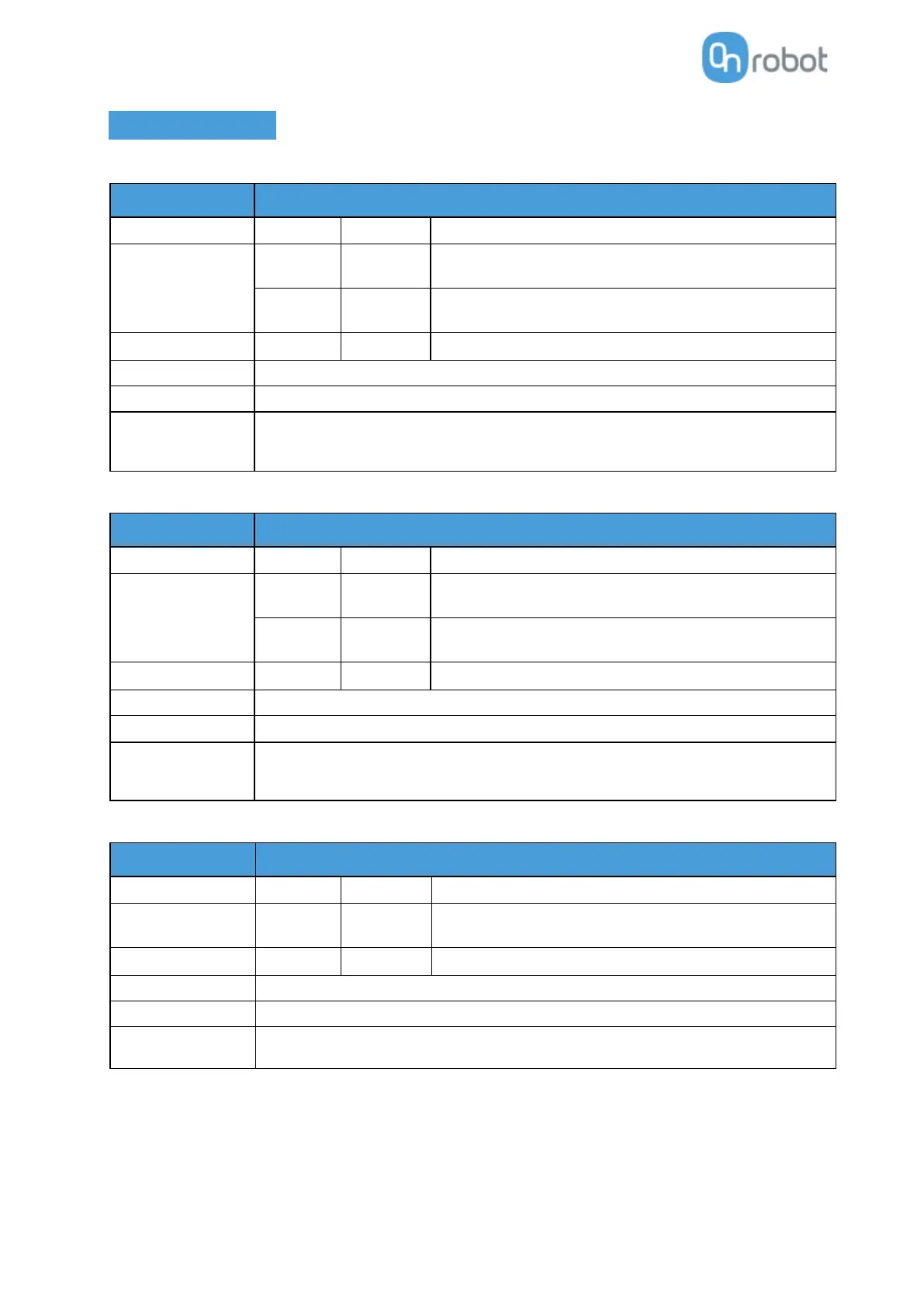
OR_Gecko_padOut(instance, wait)
1: single or primary - in dual configuration
2: secondary in dual configuration"
0: return after command is executed
1: return after pads reached the final position
instance = 1
waitFor = 1
CallProc OR_Gecko_padOut(instance, waitFor)
OR_Gecko_padIn(instance, wait)
1: single or primary - in dual configuration
2: secondary in dual configuration
0: return after command is executed
1: return after pads reached the final position
instance = 1
waitFor = 1
CallProc OR_Gecko_padIn(instance, waitFor)
1: single or primary - in dual configuration
2: secondary in dual configuration
Gripper measures the preload force in N
Get preload force form the gripper.
instance = 1
CallProc preload_force = OR_Gecko_getF(instance)