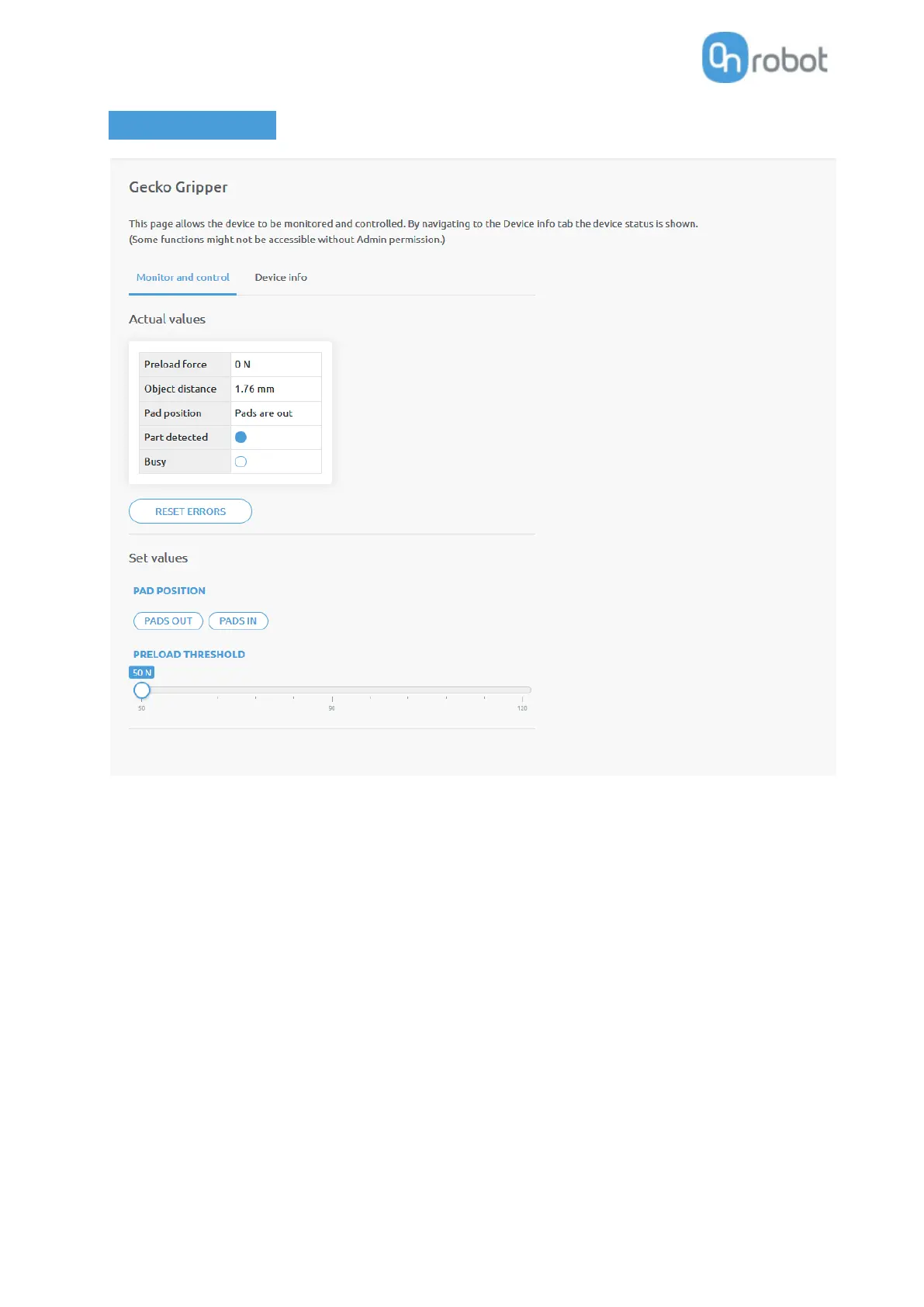
There is a force and an ultrasonic distance sensor in the gripper. The actual values of these sensors are:
• Preload - the current forces acting on the pads (below 50N it displays 0N)
• Object distance - how far the object is from the bottom of the gripper
The state of the gripper could be:
• Pad position- Pads are either In or Out (out means ready for gripping)
• Part detected - the set preload force limit is reached, and object distance is < 18mm
• Busy - the pads are moving
The pads can be controlled by clicking on the Out and In buttons.
The Preload threshold value can be changed if higher preload force is required for a proper grip.
This value is only used to generate a proper Part detected signal.