FP∑ Positioning Unit Automatic Acceleration / Deceleration Control (E Point Control: Single - Speed
Acceleration / Deceleration)
6-5
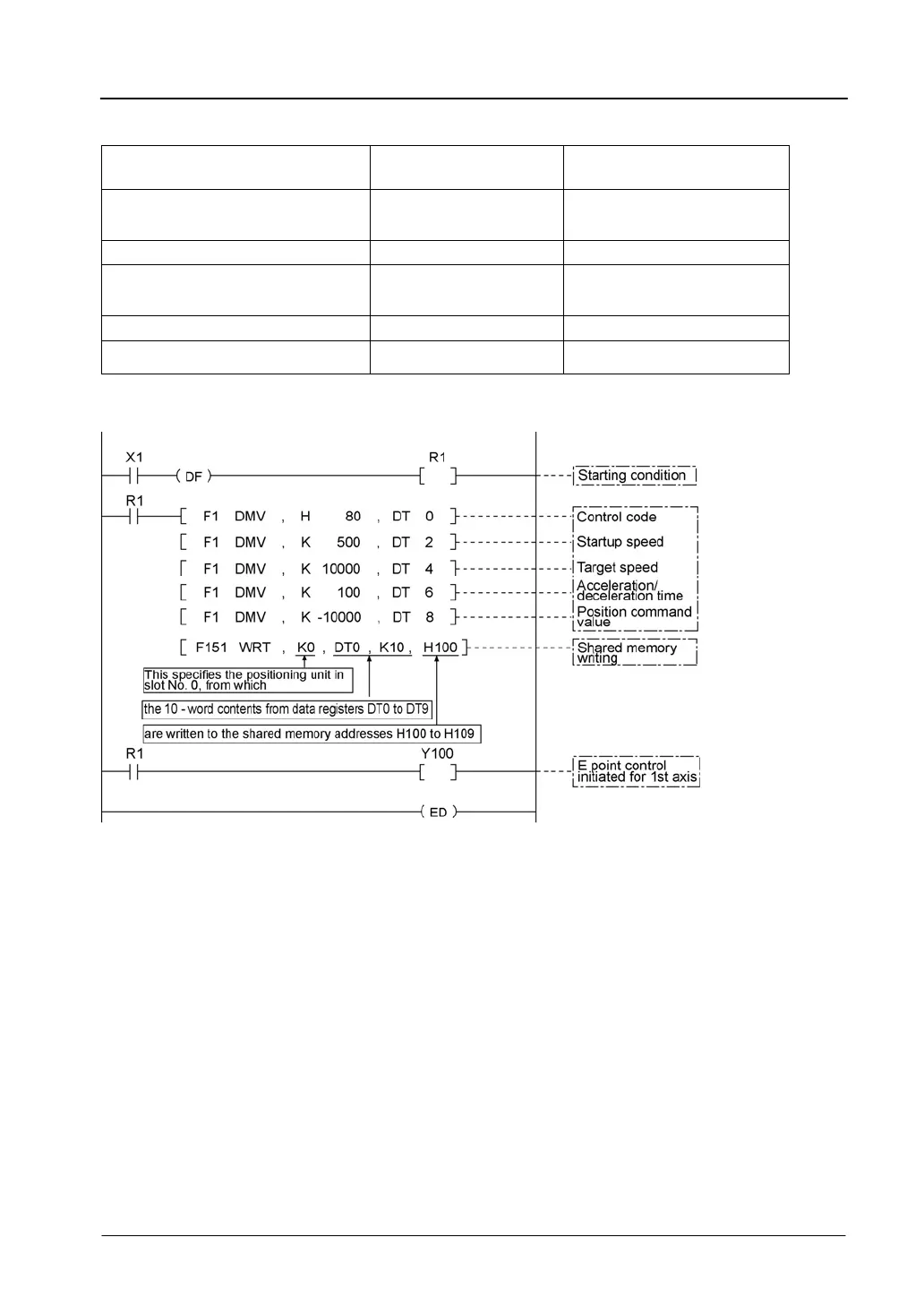
Shared memory settings
Control parameter setting content
Set values in sample
program example
Range of acceptable settings
Control code
H80 Note:
<Increment method, Linear
acceleration/deceleration>
Refer to page 16-7.
Startup speed (pps) K500 K0 to K4,000,000
Target speed (pps) K10000
K1 to K4,000,000
Set a value larger than
the startup speed.
Acceleration/deceleration time (ms) K100 K0 to K32,767
Position command value (pulse) K-10000
K-2,147,483,648 to
K2,147,483,647
Note: If the limit error occurs, set H0 as the limit input valid logic can be changed.
Program
Precautions concerning the program
When Over limit switch(+) and Over limit switch(-) are not connected, change the limit input valid logic
using the control code. The default setting is the input existing when the power is not supplied, that is,
is the input existing without the Over limit switch connection.
-The same shared memory areas to which the various control parameters are written are used for
acceleration/deceleration control, JOG operation,JOG positioning operation, home returns, and other
types of control. These should not be overwritten by other conditions.
-If the values for the startup speed, the target speed, the acceleration/deceleration specified, a set value
error will occur, and operation cannot be initiated.
-The number of the startup flag varies depending on the number of axes the unit has, and the installation
position.
-The specified slot number and shared memory address vary depending on the slot position and axis
number of the positioning unit.