RealMan (Beijing) Intelligent Technology Co., Ltd.
18
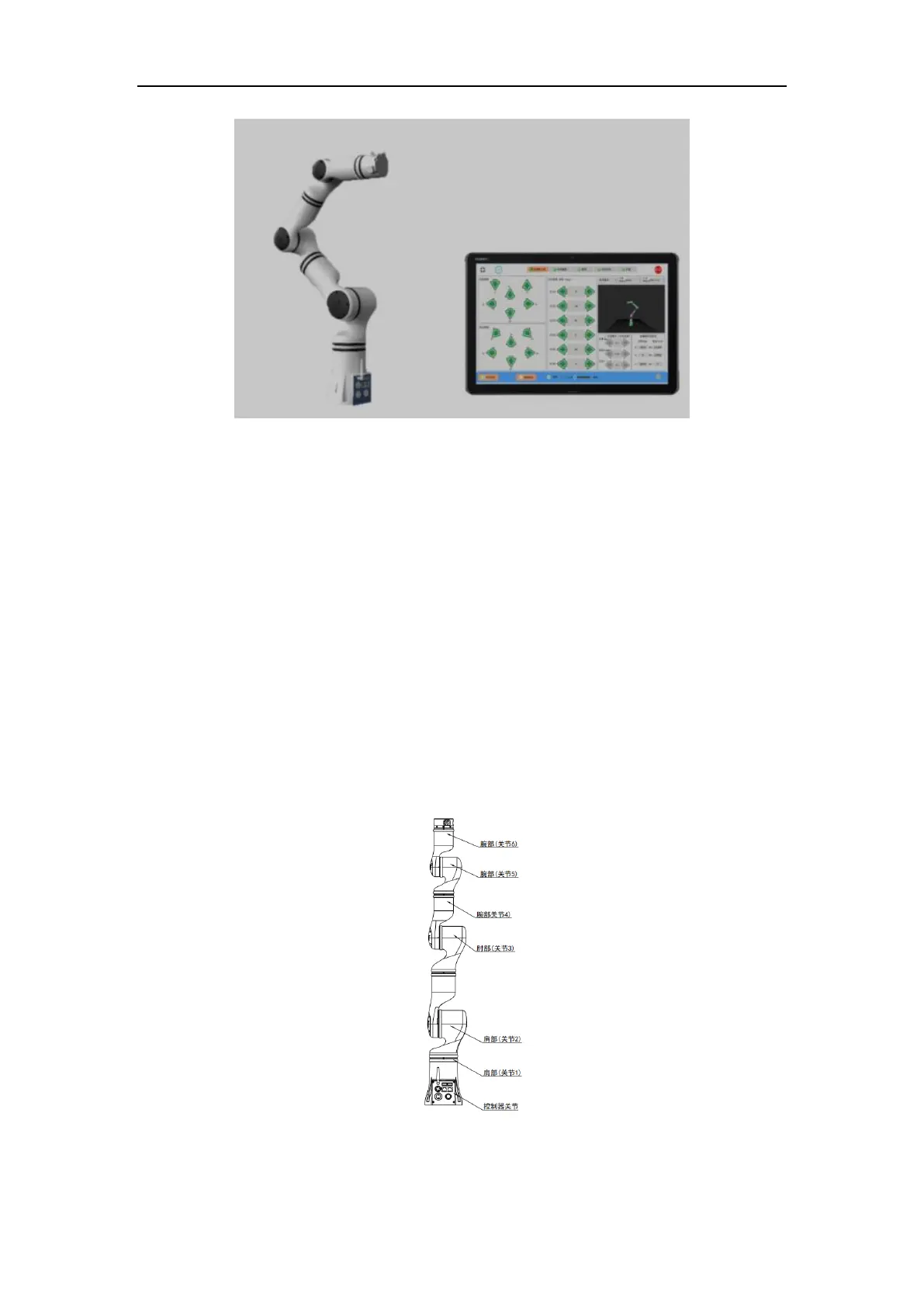
Fig. 5-1 The overview of the robot.
As shown in Fig. 5-1, RM65-B cooperative robot system is mainly composed of robot
body or the robot arm, controller (integrated in the body base) and tablet/pad with
teaching software (optional). The robot body mimics a human arm that has six rotating
joints, each representing one degree of freedom (DoF). As shown in Figure 5-2, the
robot joints include shoulder (joint 1), shoulder (joint 2), elbow (joint 3), wrist 1 (joint
4), wrist 2 (joint 5), and wrist 3 (joint 6). An arm tube is used to connect the shoulders
to the elbows. After the teaching software is connected with the controller, the user can
control the rotation of each joint of the robot arm to move the end tool to different
positions and poses.
Fig. 5-2 The distribution map of robot joints.