RealMan (Beijing) Intelligent Technology Co., Ltd.
57
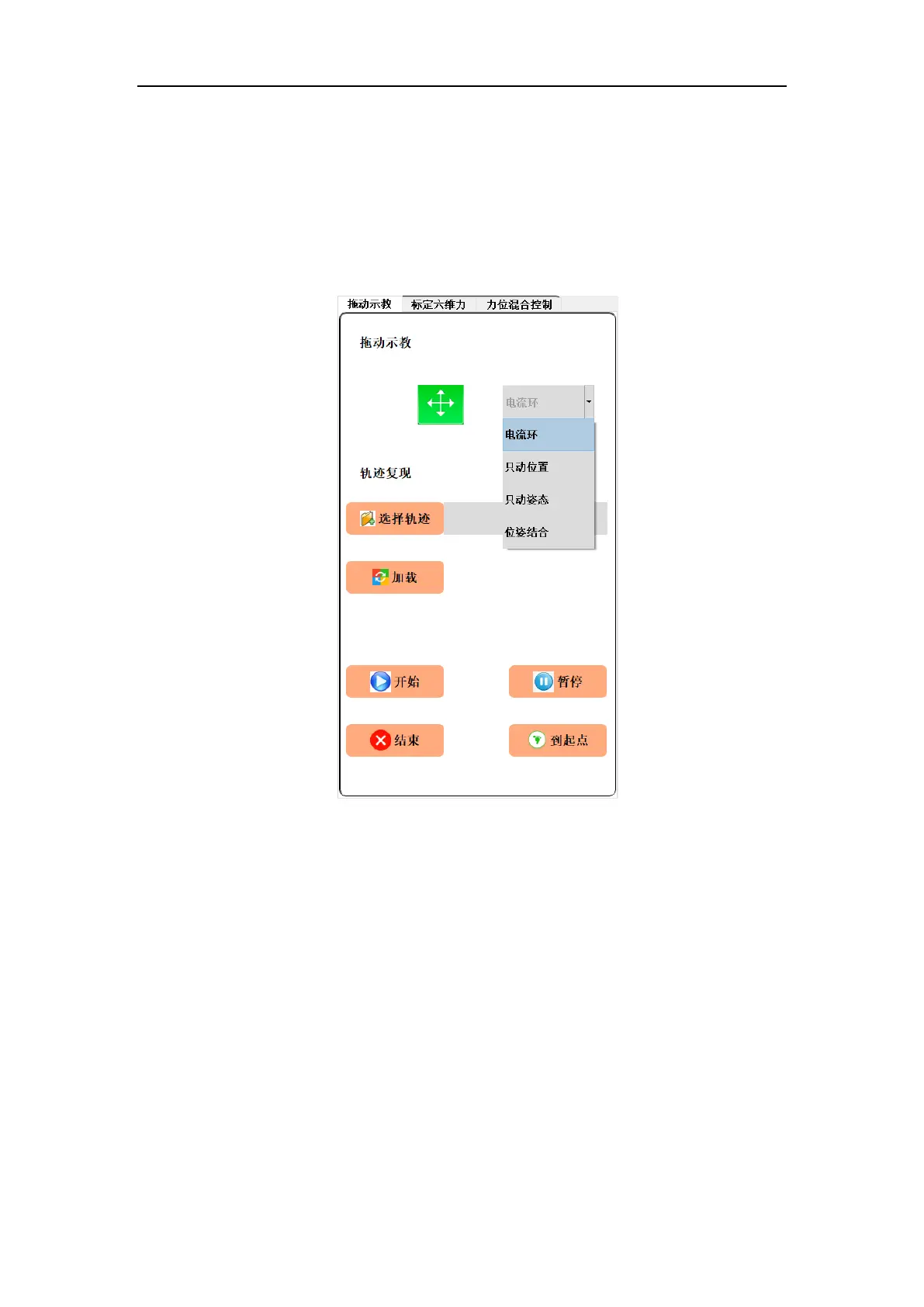
to complete the track recording, and click the blue button at the end of the robot arm to
reproduce the track.
Teaching-by-dragging has four modes: current loop, position only, pose only, and pose-
position combination of four ways (the latter three modes need six-axis force sensor).
Fig. 8-39 Teaching by dragging.
8.4 Configuration
8.4.1 System Configuration
The system configuration interface mainly configures the communication of the robot
controller.