RealMan (Beijing) Intelligent Technology Co., Ltd.
19
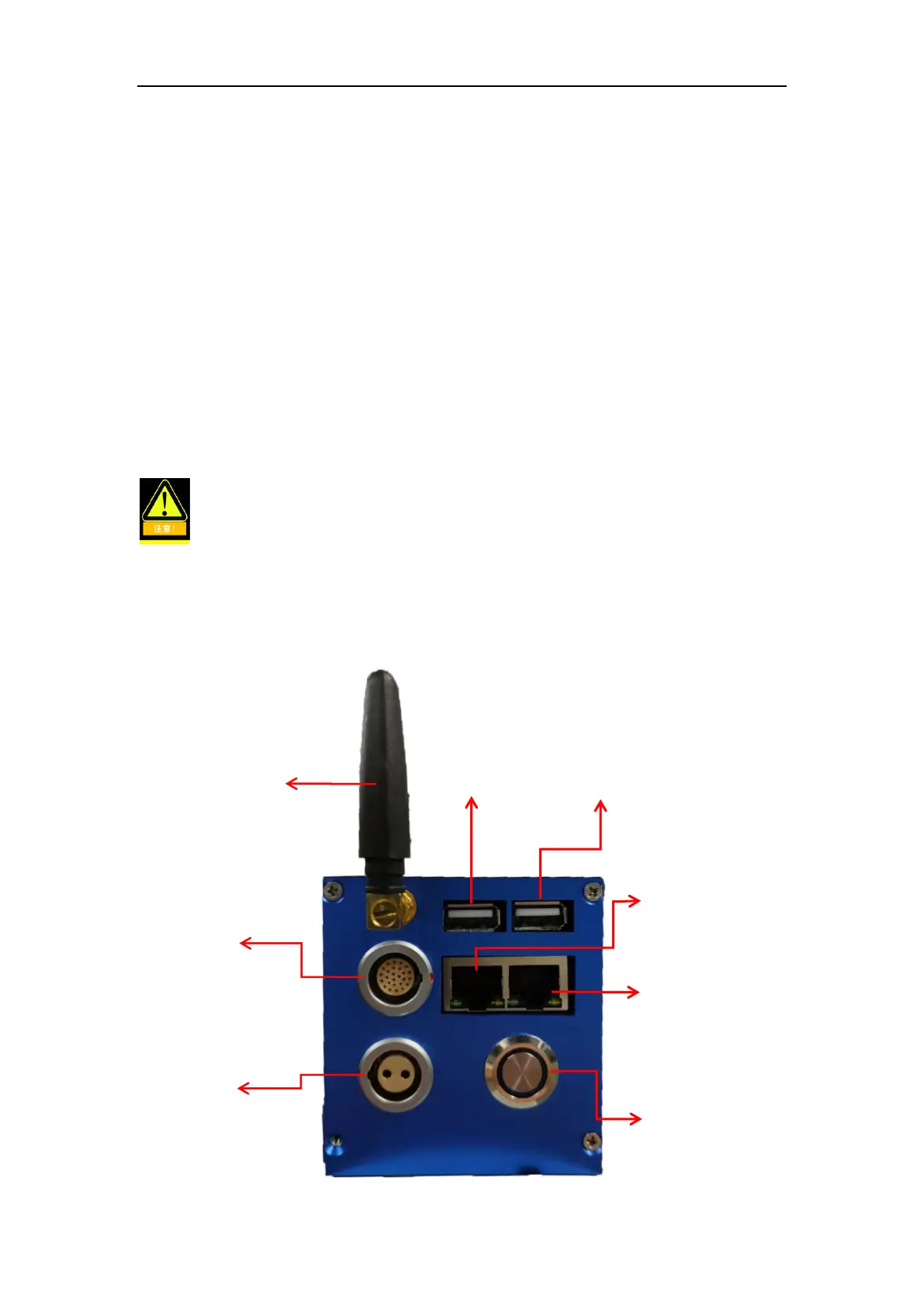
5.1.2 Electrical Interface
A controller is integrated at the bottom part of the robot arm for controlling the robot
and communicating. The robot arm is powered by DC 24 volts (when using a DC power
supply, select a DC power supply with an output of not less than 20A), and the power
supply interface is a 2-core aviation plug, located at the lower left corner of the
controller panel. In the 2-core power cable, the brown core is the positive power supply,
and the blue core is the negative power supply. The robot arm also integrates a variety
of communication interfaces for data transmission with various devices. as shown in
Figure 5-3 below.
The positive and negative power cables must not be reversed, otherwise the
equipment will be damaged! (The factory standard power cord, brown is positive, blue
is negative) In addition, the power supply range of the robot arm is DC20V~DC27V,
exceeding this range may also damage the robot arm!