RealMan (Beijing) Intelligent Technology Co., Ltd.
36
Fig. 8-9 The menu bar.
8.2.4 Robot Arm Emergency Stop Button
When this button is pressed, the robot arm stops at its fastest speed and the trajectory is
unrecoverable.
Fig. 8-10 The robot arm emergency stop button.
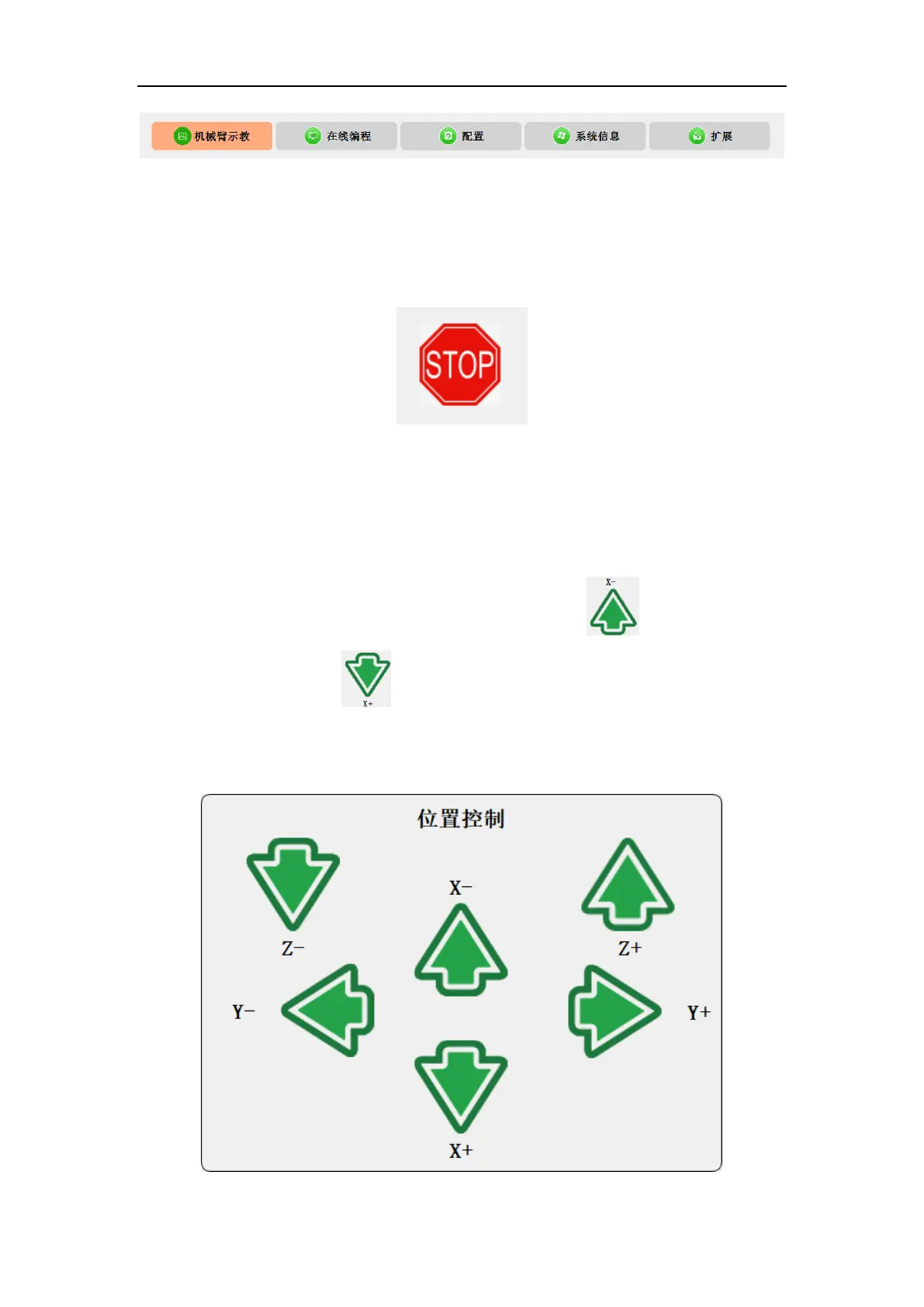
8.2.5 Position Control
The position of the robot arm end can be controlled based on the Base coordinate system,
the tool coordinate system (Arm_Tip) and the customized coordinate system. The user
can teach the robot end in different coordinate systems. denotes moving to
negative x-axis direction, denotes moving to positive x-axis direction. Long
hold the button, the robot moves, after releasing it, the robot stops moving. Likewise,
same thing with the rest of the buttons.