Robotiq Hand-E C10 Gripper Instruction Manual
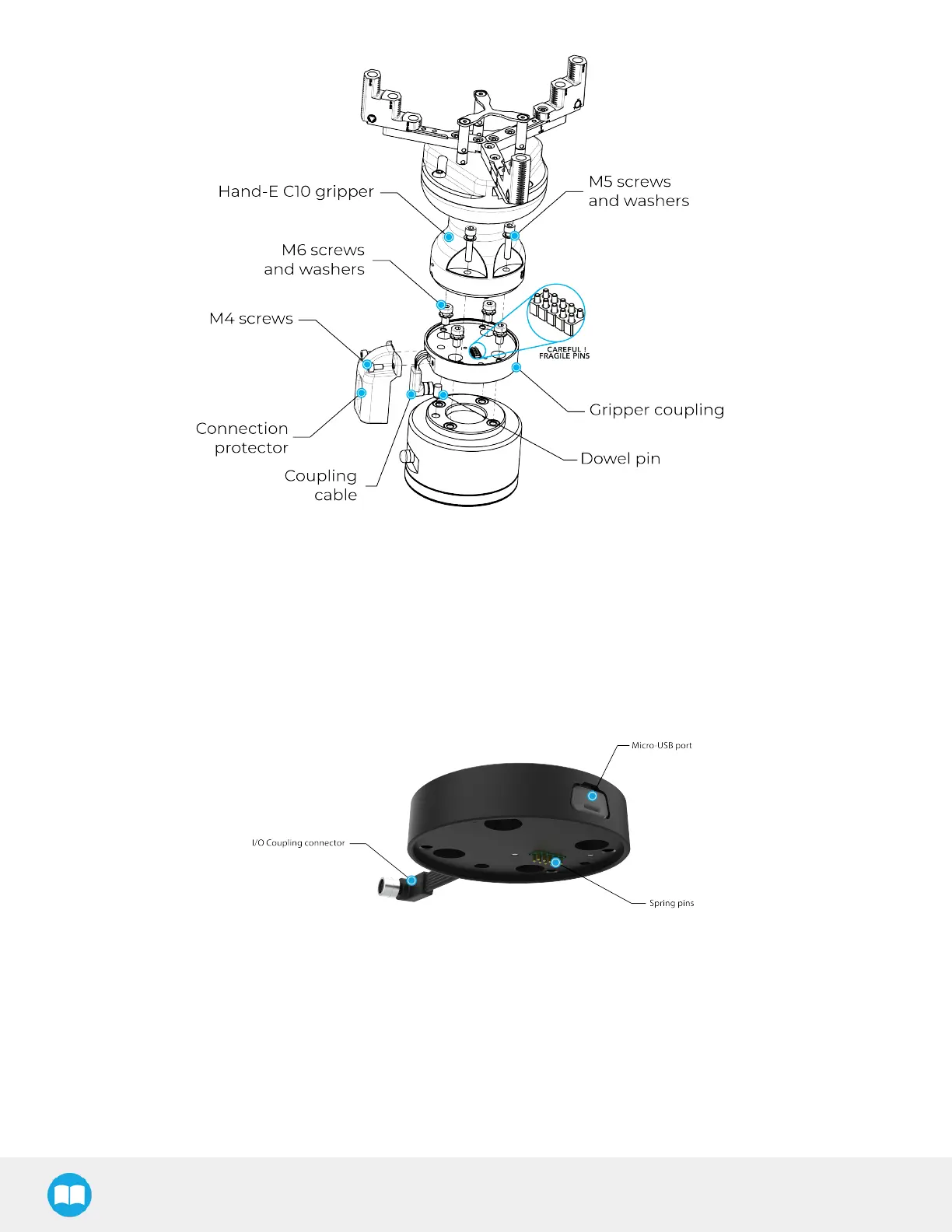
Fig. 3-2: Installing Hand-E C10 on the Robot Tool Flange for e-Series
Installation with the UR Wrist connection Kit for CB-Series (I/O Coupling)
I/O Coupling:Overview and Nomenclature
The Robotiq I/O Coupling is a robotic peripheral designed to allow a direct connection of the Robotiq Hand-E C10 Gripper to the
Universal Robots CB-Series tool flange. It discards any cable management and avoids downtime caused by cable issues.
The robot sends I/O signals to the coupling which sends Modbus RTU commands to the gripper based on four (4) possible
presets. These presets are determined by the I/O signals.
Fig. 3-3: Robotiq I/O Coupling
The status LED, integrated in the micro-USB port presented in the figure above, will be:
l
Solid blue/red when booting
l
Solid red when looking for product or waiting for communication
l
Solid blue when powered with no errors (while communication is active)
l
Solid green when communicating with USB
18