Start up with PC
42 05/STM-48V/en/2011-04-01/CW
10 Start up with PC
10.1 SCHUNK MCS-12 controller
10.1.1 Functional principle
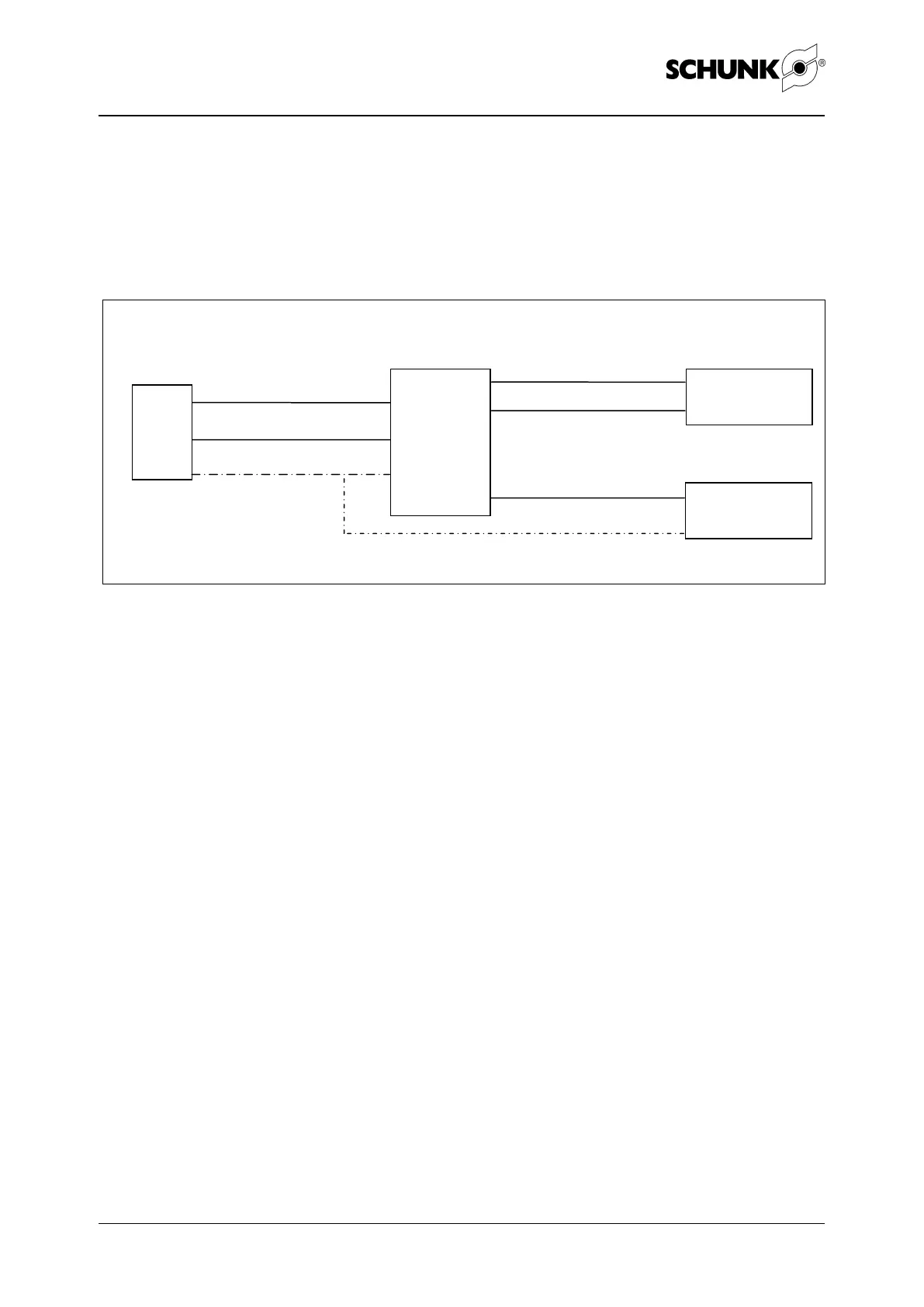
Figure 13 Functional principle
The actuator (in this case STM) is controlled by the external con-
troller (MCS12). It receives the required parameters from the
higher-level control system (master).
The STM's sequence of movement is linear. The rotor performs a
mechanical movement. While this is done, its position is con-
stantly checked. The data required for this is sent back to the
controller from the sensors.
The temperature sensor can be evaluated via the controller, if it
supports the function and KTY84. As an alternative, the evalua-
tion can be performed directly via the control system (master).
The STM is controlled via the user interface, which transmits the
required data to the external logic. For example, the following
parameters can be specified:
• Target position
• Speed
• Acceleration
• Current
Power supply for controller
Communication
(CAN, Profibus DP, RS232)
Position measuring system
Temperature sensor monitoring